���пƼ���ѧ�ձ�����Ŷӣ����Թ��ܸ�֪Һ��ײ����3D��ӡ����ˮ��������
ʱ�䣺2023-03-15 10:23 ��Դ���й�����ԺԺ�� ���ߣ�admin �Ķ�����
�й�����ԺԺ����Engineering��2022���8�ڿ������пƼ���ѧ�ձ�����о��Ŷӵġ����Թ��ܸ�֪Һ��ײ����3D��ӡ����ˮ����������һ�ġ�����ͨ������3D��ӡ����������г���ˮ��������Դ��������������Թ��ܸ�֪�����ˮ�Σ��Ӷ�ʵ����ˮ������������ת��������ָ�������Զ����ij���ˮ������Ч������ˮ�εĹ�/Һ𤸽����֤�������������õĻص��ԣ�������˹Τ��ֵ������ȷ���˰�������Ͳ��Բ������ڵĿɿ����أ����о����Ƕ�����ת�����ܵ�Ӱ�죻�������3D��ӡ������������������ͨ���ռ�����ˮ��������ɫ��������ܽ��������������о�Ϊ��������ת������ʵ���Թ��ܸ�֪ϵͳ�ṩ���µ�;����
һ������
��ά��3D����ӡ��Ϊһ�����˵��������켼�����ٽ��˶���Ҹ��ӽṹԭ�͵����죬�ں��պ��졢��֯���̡��鱦�����Ե��ӵ�ѧ������չ���˾��ǰ����Ŀǰ���ɴ������ӺͿɴ�ӡ�ۺ�����ɵ�3D��ӡ���Խṹ�����ڿɿػ�е�֡��ɱ�����������˵ȷ���ӵ�о�DZ�������������ǵĹ㷺��ע��Ji�ȱ�����һ������ǯ�ʹ����¶������գ�ʹ�����ֲ���ͨ��һ����[���ֹ����DLP��]ʵ��3D��ӡ�����ҿ������ⲿ���¶��½��б��Ρ����岶��������ͷš����Kim�Ⱥ�Qi�ȷֱ�ͨ��ֱ��īˮ��д��DIW����ӡ�����ڳ�����ģ��FDM����ӡ�����˳������ų롣ͨ���ھۺ�����ʵ����̹�����ʩ�Ӵų���Ϊ�Ż��������ϲ����������ԵĴŻ�ǿ�����ߡ������Һ���3D��ӡ������ȣ�ѡ���Լ����սᣨSLS����ӡͨ�������Ʊ����������оߣ��Ա�ͨ���Ŵ̼����пɿ��α䡣
�����Ʊ����ⲿ�ų������Ļ�е�ֺ�����������⣬�������ṹ���ܵ����������α�ʱ����ų��ֲ�Ҳ��֮�ı䣬�����ýṹ���н���е��ת��Ϊ���ܵ�����������������о��Ŷӱ�����һ��ͨ�����Դŵ�ϵͳʹ��ˮ�η���Ĺ�����Ȼ���������õļ��������Ҫ��ģ�ƺ���װ�����������̷����Һ�ʱ��3D��ӡ��������Ϊ�����ڴ����ռ��������졣���⣬3D��ӡ����ʹ�û���������ƺ�����Ĵ��Խṹ���ڵ���������������£��������ɶ��ִ��Լܹ����Ӷ��Ż������ʵ�������������
�ڱ����У�����3D��ӡ����������г���ˮ��������Դ����������Ӷ�ʵ����ˮ������������ת����ͨ�����ּ��ɵ�3D��ӡ�����������������ת��װ�ã��ɴ��Զ����͵��Ը�״�ײ���ɡ�������ˮ�����´����Ļ�е���ʱ������3D��ӡ����������3DMD����ͨ�����ڲ��ĵ�����Ȧ������ͨ���仯���Ӷ��������ܡ�ֵ��ע����ǣ����Զ����ij���ˮ������Ч������ˮ�εĹ�/Һ𤸽����֤�������������õĻص��ԡ����⣬������˹Τ��ֵ���棬ȷ���˰�������Ͳ��Բ������ڵĿɿ����أ����о����Ƕ�����ת�����ܵ�Ӱ�졣�������3DMD����������ͨ���ռ�����ˮ��������ɫ��������ܣ�LED���������������о�Ϊ��������ת��������ʵ���Թ��ܸ�֪ϵͳ�ṩ���µ�;����
�������Ϻͷ���
��һ������
Nd2Fe14B������400Ŀ��������ŵ�´�����������˾���������Ծ۰�����TPU����ĩ��LUVOSINT TPU X92A-2 WT���¹�LEHVOSS���ţ�����ˮ�������裨AEROSIL R202���¹�Evonik Degussa��˾�����Ҵ���AR, �� 99.7%���Ϻ������������Ƽ��ɷ�����˾����ۺ��Agilus30������Stratasys��˾�������Ͼ����չ���ʱ��ԭ��ʹ�á��������˻���ͭ��Ȧ���������£��߾�0.1 mm���ھ�3.2 mm���⾶25 mm�����1.5 mm��
������3D��ӡ��������������
���Ƚ�Nd2Fe14B�ŷ۽�����ĥ�����������ղ�ͬ������������20%��30%��40%����TPU��ĩ���Ȼ�ϡ���ֻ�Ϻ���ĩ״���ϲ��ϵ��뼷������ϵͳ��Wellzoom B����������˹��Ƽ�����˾���С���ϵͳ�������ݸ˼����������ƹ��������Ʊ�3D��ӡ������Nd2Fe14B-TPU���ϳ�˿��Ϊ��ȷ�����賤˿����Ч���������ڲ�ͬ��������������Nd2Fe14B-TPU���ϲ��ϵļ����¶�����Ϊ140~160 ��C��ֵ��ע����ǣ��¶ȳ���160 ��Cʱ���ܵ��¸��ϲ��Ͻ�������̼�������һ���Ҫע�������Ժ����ȶ��Ե����⡣ͬʱ��ʹ���߹��ռ�Nd2Fe14B-TPU���ϳ�˿��Ȼ���ռ��ij�˿ֱ������FDM 3D��ӡ����������λ�ϼ���������Զ�����
�����е�3DMD�ṹ��ͨ����ҵ3ds Max������Ƶġ�����FDM 3D��ӡ�����������˲�ͬ��ȣ�1~3 mm������ߴ磨�뾶Ϊ1.0 mm��1.5 mm���Ķ�����Զ����������Ĵ��Կ���ͨ���Ż������й���۾þ��I�O������˾����1900 V���ϵĸ�ѹ�²���������ų����д�ֱ�Ż���10%��������������ˮ�Զ����������������������������ɢ���Ҵ��У�Ȼ�����������Һ������3D��ӡ�Ĵ��Զ���������ˮ������Agilus30��ۺ�������ͨ��Polyjet 3D��ӡ�������쵯�Ըˣ����Ը˳���Ϊ2~8 mm�����ͨ������װ��������������Զ��������Ը�״�ײ��͵���ͭ��Ȧ�����3DMD�����졣
���������������
ͨ��ԭλX����������ϲ�ɨ�裨micro-CT��������Xradia 510 Versa���¹�zeiss���ţ��۲�Nd2Fe14B�����ڴ��Ը��ϳ�˿����ƴ�˿���еķ�ɢ�����ͨ��������ɨ�����������FESEM����Sirion 200������FEI��˾���۲�Nd2Fe14B��������̬�Լ����������账��/δ�����Ĵ��Զ������档ͨ�������3D������DSX510����Olympus��˾���۲���Զ��������С��3D��ӡ�Ķ����Ÿ�Ӧǿ�ȷֲ��ɶ�ά�ų�����ϵͳ��F-30�������亣�ѳϴŵ�Ƽ��������ι�˾��ȷ����ͨ���Ӵ��Dz����ǣ�SDC-350����ݸ���ɶ�������������˾�������������账��/δ������Ʒ�ھ�̬ģʽ�µ�ˮ�Ӵ��ǡ�ͨ����������ϵͳ��ST-857���ձ�NAC Image Technology�ɷ�����˾��ʵʱ��¼ˮ�ε���ʱ����Ʒ״̬��ͬʱ��ͨ���绯ѧ����վ��Autolab PGSTAT204����ʿMetrohm��˾���о�����������Ļ�е������ص�����ת�����ܡ�
���ģ���ֵ����
ʹ��ANSYS Maxwell�����������㲻ͬ����������3D�ų�ǿ�ȷֲ����Ż�����ȡz������������ǰ���о�������ʹ����һ����ЧһԪģ�͡��ڱ����У���Nd2Fe14B-TPU�Ŷ����ͺ�����Ϊͬ�����Ĵ������ڼ�Чģ���У���������Hc��Ϊ-151197.2 A��m-1��ʣ�ţ�Br��Ϊ0.19 T��
����ʵ����
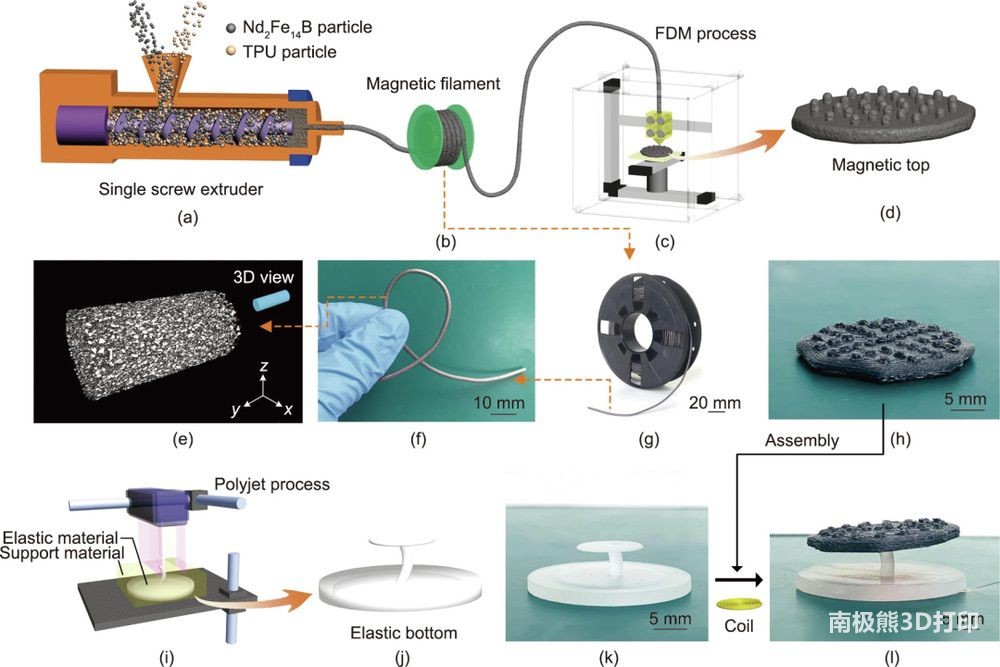
���Ĺ�����һ���ɴ��Զ����͵��Եײ���ɵ�3DMD���������ֱ���FDM�� Polyjet 3D��ӡ�������ɣ�ͼ1����ͨ����Nd2Fe14B����Ϊ����ǿ�����Ų��ϣ���Ϊ�����нϸߵ�����ܻ���TPU��Ϊ������ģ���������Ծۺ�����ʺ���FDM��ӡʱ�������Խṹ������¼A�е�ͼS1������ˣ�ƽ�������ߴ�Ϊ18.95 ��m��Nd2Fe14B��ĩ������¼A�е�ͼS2����TPU��ĩ��4��6��������[ͼ1��a��]���Ȼ�ϣ�ͨ����ѹ����ϵͳ������¼A�е�ͼS3�������������������ԵĴ�˿[ͼ1��b������f������g��]��
ͼ1��e����¼A�е�ͼS4��ʾ��ͨ��ԭλX����������ϲ�ɨ�輼����õĸ��ϳ�˿��Nd2Fe14B���Կ����ľ��ȷ�ɢ״̬����������������˿ֱ��ԼΪ1.72
mm��������FDM
3D��ӡ�豸��Ӧ��[��ͼ1��c����¼A�е�ͼS3��c��]����ˣ��ڽ�һ�㱡������ˮ���������������������������Զ�����ӡ��30
mm��ֱ������ 3 mm����ȣ��Ĵ��Ժͳ���ˮ����[ͼ1��d������h��]��
Ȼ��ʹ��Polyjet 3D��ӡ��������30 mm��ֱ������ 6 mm�����ȣ��ĵ��Ը�״�ײ�[ͼ 1��i������k��]����FDM������ȣ�Polyjet 3D��ӡ��������������е�����ģ���ĵ��Ծۺ��Ϊ��ʩ�������µĿ�������ṩ����֧�š����ͨ����ҵ�ϼ������Զ��������Ը�״�ײ�ճ����һ���ڵײ��ռ������Ȧ�����3DMD [��ͼ1��l����¼A�е�ͼS5]��
ͼ1.
����3DMD�����졣��a��~��d��ͨ��FDM����������Զ�����ʾ��ͼ����e��~��g�����ϴ�˿�ı�������e��ͨ��CT������õ�3Dͼ��f���������Դ�˿�Ĺ�ѧ��Ƭ����g�����õľ����˿����h������Nd2Fe14B��TPU���Ϸ�ĩ�Ĵ�ӡ���Զ�������i������j��ͨ��Polyjet�������쵯�Բ�����ʾ��ͼ����k�����Ը�״�ײ��Ĺ�ѧ��Ƭ����l���ɴ��Զ�����������Ȧ�͵��Ը�״�ײ���װ���ɵ�3DMD��
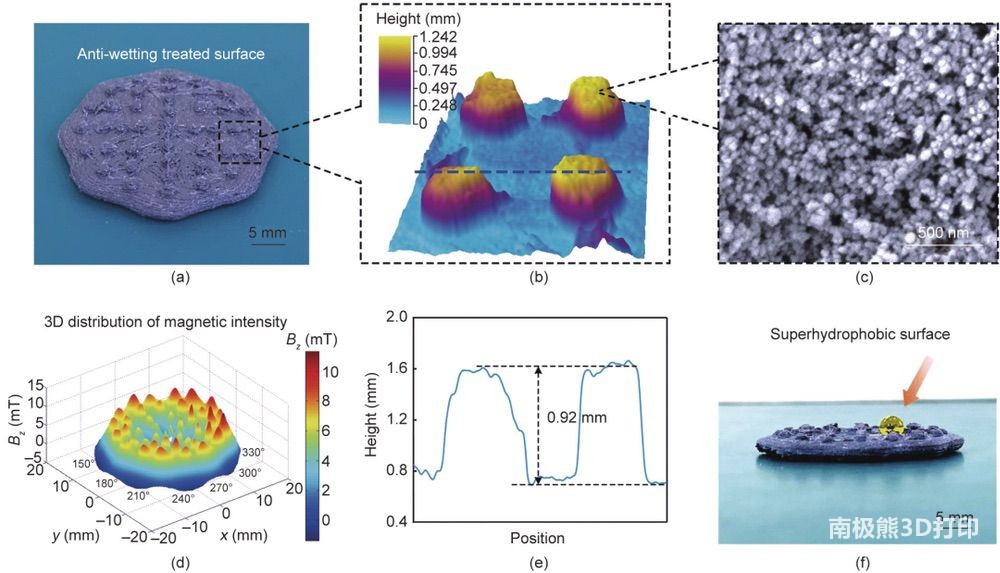
��3D��ӡ���Զ�������ۺ����Խ���ϸ�µ��о���ͼ2��������ͼ2��a���еĹ�ѧͼ����״�ṹ����ӡ�ڶ����ϡ����ڴ���һ�㱡������ˮ�������������������Զ����Դ���ɫ��ͼ2��b�������˴��Զ�����ͷ���е���������̬��ͨ�������3D����������Լ0.92 mm����߶�[ͼ2��e��]�����ݷŴ��FESEMͼ����ʾ[ͼ2��c��]��������������������ۼ���һ����ˮ�Զ��������������ĵͱ����������/�����ֲڶ����ϣ�ʹ��ӡ�Ķ�����ʾ����ˮ״̬[ͼ2��f��]��
ͼ2.
FDM������ӡ�ij���ˮ���Զ����ı�������a������ˮ���Զ����Ĺ�ѧ��Ƭ����b��������ij����3D����ͼ��c�������Ĵ��Զ�����������ˮ����������������FESEMͼ��d���������账�����Ĵ��Զ����ĴŸ�Ӧǿ�ȵ�3D�ֲ���Bz��ʾz��ĴŸ�Ӧǿ�ȣ���e�������3D������������߶ȣ���f����ѧ��Ƭ��ʾ���Զ����Ի�ɫˮ�εij���ˮ�ԡ�
���˳���ˮ�����⣬���о��˴�ӡ�����Ĵ��ԡ������Ż����������˴�ӡ���Զ����ĴŸ�Ӧǿ�ȵ�3D�ֲ�[ͼ2��d��]����Ȼ����ǿ�Ĵ�����������Ķ�����ƽ������Ÿ�Ӧǿ��ԼΪ9 mT��
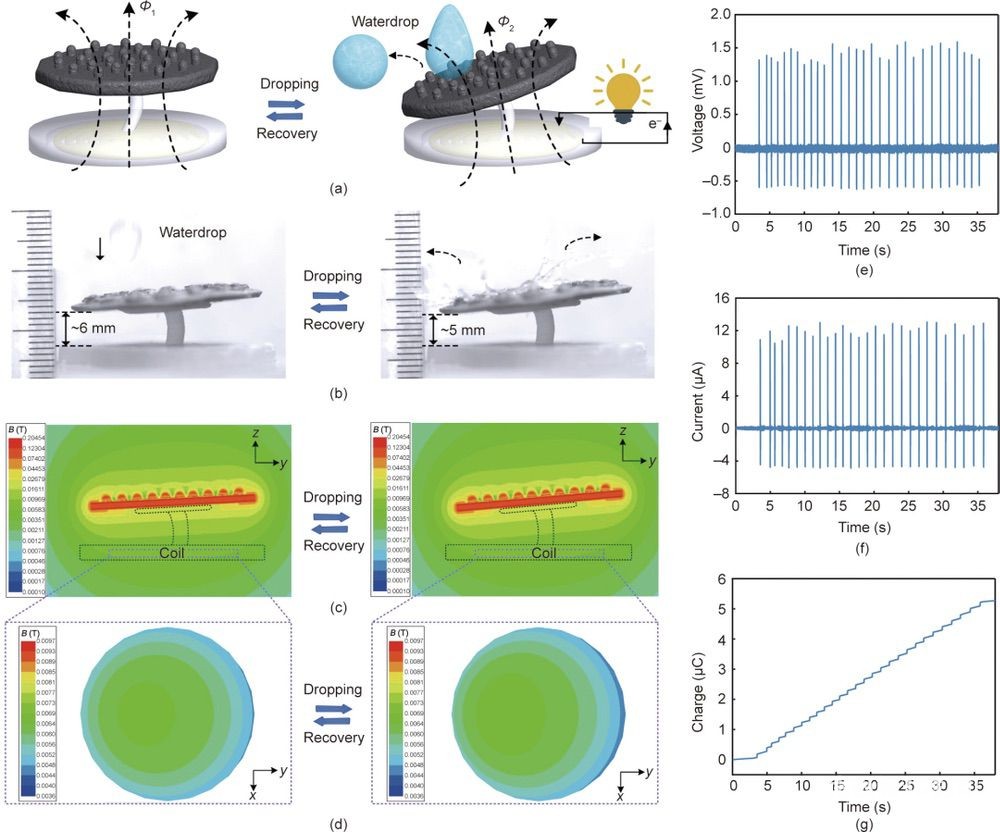
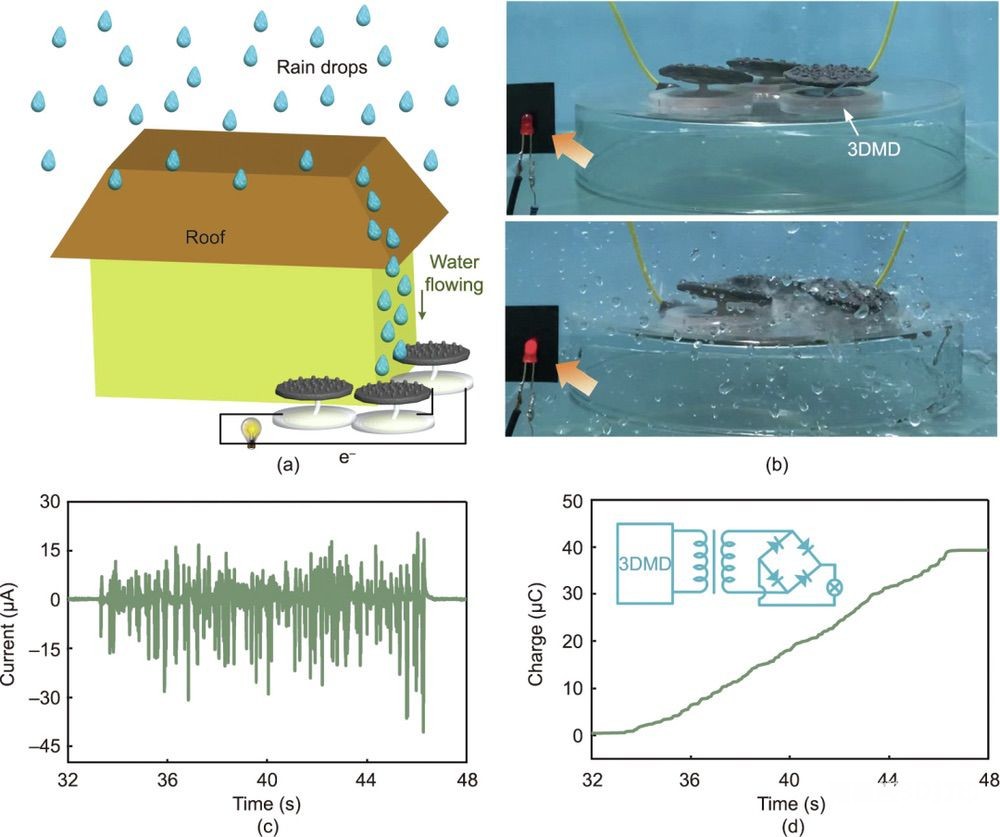
��ͼ3��ʾ����3DMD������ת�������о�����ӡ�����ĺ�ȡ��ŷۺ����͵��Ը˵ĸ߶ȷֱ�Ϊ2 mm��40%��������������6 mm����ˮ�Σ�55 ��L���ε�3DMD���棬����߶�Ϊ40 cm�����ڸ�״�ײ��ɵ�����ģ�����Ծۺ����Ƴɣ����Ը˿���������������Իָ�����ʵ�ִ��Զ����͵ײ���Ȧ֮��ľ���仯������������£�ͨ����Ȧ�Ĵ�ͨ�������˱仯�����´����µ�ˮ���з���[ͼ3��a��]��
ͼ3.
3DMD�����Թ��ܸ�֪�Ը�Ӧ����ˮ�ε���������a��3DMD�ڵ�ˮ�����е�����ת������ʾ��ͼ����b���ɸ������ϵͳ��������ˮ�ε��䵼�±���֮ǰ����֮���ң���3DMD��ѧͼ��ͨ��3D�������õ���ͼ��c���ͣ�d���ֱ���3DMD�ĴŸ�Ӧǿ�ȷֲ���2D��ͼ�͵�ˮǰ����Ȧ����һȦ�ĴŸ�Ӧǿ�ȡ���c����ɫ����ɫ���߷ֱ��ʾ����Ԫ������Ȧ��λ�á���Ӧ�ĵ�ѧ���ܣ���e����ѹ�������f�������������g��ת�Ƶ����ʱ�����ߡ�����������£�ˮ�Σ�ÿ��Һ�����Ϊ55
��L����40 cm�ĸ߶��ͷţ���������3DMD�ı����ϡ������Ĵŷۺ���Ϊ40%�����Ϊ2
mm����1����2���ֱ��ʾˮ�γ��ǰ��ͨ���ײ���Ȧ�Ĵ�ͨ����B���Ÿ�Ӧǿ�ȡ�
�ɸ����������¼�Ŀ���[ͼ3��b��]��ʾ����Ӧ�ı��ι��̡��о����֣����Զ����͵ײ���Ȧ֮��ľ���仯ԼΪ1 mm���Ӷ�����ͨ����Ȧ�Ĵ�ͨ�������仯����һϵ��ˮ������ͬ�����µ���ʱ����ͼ3��e������f���зֱ��¼����ʱ��仯����Ӧ��ѹ�͵�����������ҿ����ҵ��й��������-������Ӧ��ֵ�����е�һ����ѹ�͵�����ֵ��ƽ������ֱ�ﵽ1.6 mV��12.9 ��A���ڱ���/�ָ�������ת�Ƶ���Ӧ���Ϊ5.2 ��C [ͼ3��g��]������ǰ���о��У�3D��ӡ�����������������ⲿ��Դ���磬����о���Ա�������ʹ��ѹ���Ħ������ϵ��Թ��ܸ������ռ�ˮ�λ�С�Ļ�е�ܡ�������������ȣ����ڵ�Ź������ƣ�3DMD��������������ѷ����ļ�¼����1��������������£�3DMD���Խ�ˮ�ε���������ת��Ϊ���ܣ���ʾ���Թ��ܸ�֪������
��1����ͬ���Դ����������ĶԱ�
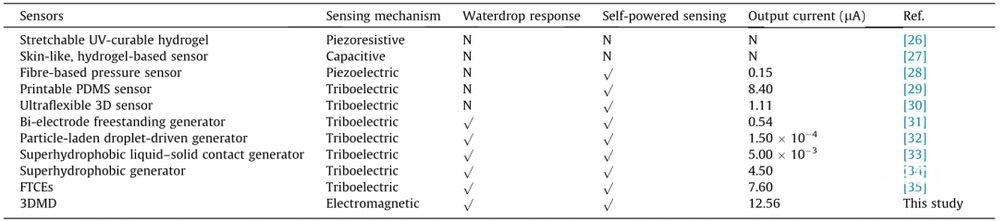
UV: ultraviolet; PDMS: polydimethylsiloxane;��: Yes; N: no; FTCEs: flexible transparent conducting electrodes.
�Ա���ǰ���3DMD�������˹Τ��ֵ���棬���о�����ת�����ơ�����3D���Ž������Դ��Զ�������3D���潨ģ���Լ������ǰ��Ĵų��ֲ�[ͼ3��c��]������������£�ʹ�õ�ЧһԪģ�������ӵĶ�Ԫ�ŷ�/�ۺ���ϵͳ��ͼ3��d����ʾ����ˮ��������3DMD����֮ǰ/֮��ͨ��һȦ��Ȧ�Ĵ�ͨ����������ɫ�ݶȣ�����ɫ����ɫ����ʾ�ų������ӡ���ͨ���仯����¼A�еı�S1����ϸ������̼���¼A�е�ע��S1������ˣ��ͷŵ�ˮ�ε��������ܿ���ת��Ϊ3DMD���α䣬ͨ����3DMD�в������ӵĴ�ͨ�������硣
Ϊ����֤����ˮ���Ե���Ҫ�ԣ��Ʊ���һ��δ��������3DMD��Ϊ������Ʒ�����г��˳���ˮ����֮�⣬������ֱ��ֲ��䡣��������Ʒ�ı���ֱ��總¼A�е�ͼS6��a������b����ʾ�����ڶ������账����ı����ܽϵͣ����Ҵ��������ľ�̬ˮ�Ӵ���ԼΪ151�㣬��δ�������ı����Ϊ62�� [����¼A�е�ͼS6��c������d��]��ͼ4��ʾ�˳���ˮ����ˮ3DMD��ˮ����������ʱ�ĵ�ѧ���ܡ�������ˮ�δ���ͬ�߶��������䵽������ϵͳ��ʱ�����ڿ���ʪ�����ԣ�ˮ�κ���ͣ���ڳ���ˮϵͳ�ı���[ͼ4��a������b��]��������ˮϵͳ�ϣ����ż�����ʪ��[ͼ4��d������e��]������һ��ʱ��ĵ�ˮ����ˮϵͳ���Իָ��������״̬��Ȼ����������ˮ��������ˮϵͳ�ϣ����´��Զ���𤸽�ڵײ���ͼ4��c������f����ʾ����������Ʒ��50��ˮ����������ʱ������ת�����ܡ�����ˮ3DMD�����ȶ��ĵ�����Ӧ������ˮ3DMD�������������ʱ��仯����˥����
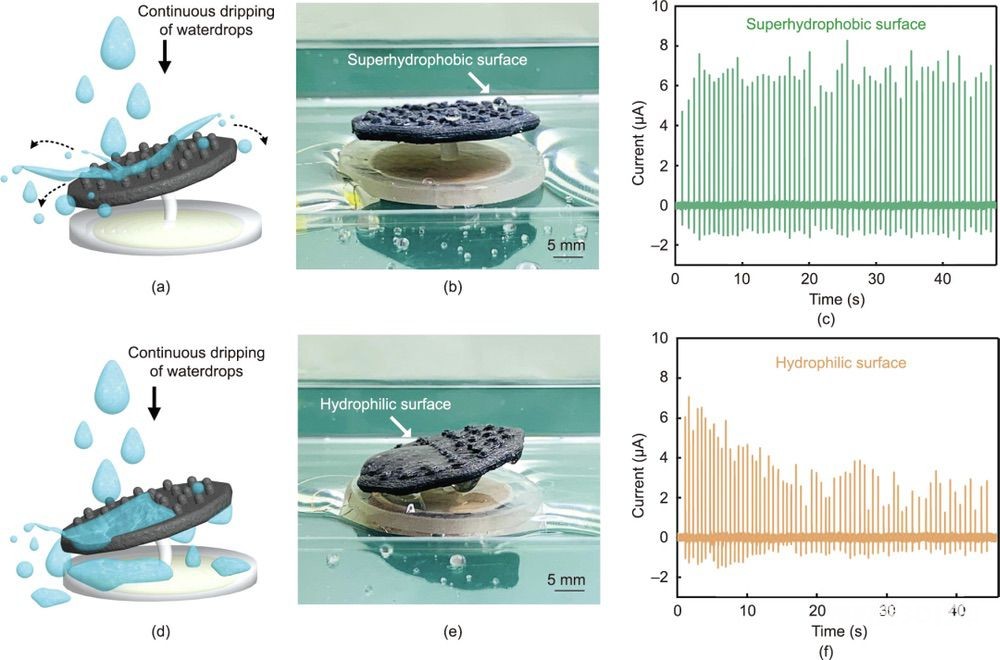
ͼ4. ����ˮ����ˮ3DMD��ˮ�����������µĵ�ѧ���ܡ�����ˮ��a������ˮ��d��3DMD��ˮ����������ʾ��ͼ����b���ͣ�e����ʾ�ֱ���50��������ˮѭ����ij���ˮ����ˮ��Ʒ�Ĺ�ѧ��Ƭ����c���ͣ�f����ʾ����ʱ��仯����Ӧ������Ӧ�����
���ڴ�ͨ���ı仯��������3DMD������ת�����ܿ��Ը��ݷ����ڸ�Ӧ���ɼ������£�

ʽ�У�E�������ѹ��n����Ȧ������������i��ͨ��ÿ����Ч��Ȧ���Ĵ�ͨ���仯����t��3DMD�ڱ����µ���Ӧʱ�䣻��Bi��ÿ����Ч��Ȧ�ĴŸ�Ӧǿ�ȱ仯��Ч����Si��ÿ����Ч��Ȧ���������
��Ϲ�ʽ��1���о��˸������������3DMD��ѧ���ܵĹ��ף�����Nd2Fe14B�����ĺ�������ߴ磬�Լ����Զ����ĺ�ȡ�Ϊ�˽�һ���о���ֻ������һ���ɱ����������������Ͳ��Բ������ֲ��䡣Nd2Fe14B������20%���ӵ�40%�����´��Զ����ı���Ÿ�Ӧǿ�ȣ�B����ǿ���Ӷ��������3DMD�ĵ������������¼A�е�ͼS7������Ȼ����Ĵ������ϣ�������������40%�����Բ������ߵĴŸ�Ӧǿ�ȣ����Ǹ���������FDM��ӡ���Ķ�����Ȩ���ӡ�����зֱ��ʺ������Ե����⣬���մŷۺ���������40%���總¼A�е�ͼS8��ʾ���Ŷ��ϵ����С�ԴŸ�Ӧǿ�Ȼ�����ת�����ܲ�������Ӱ�졣���⣬�����˲�ͬ��ȣ�1 mm��2 mm��3 mm���Ĵ��Զ����Ե����Ÿ�Ӧǿ�ȣ�����¼A�е�ͼS9������3D�������֤ʵ���Ÿ�Ӧǿ�����Ŵ��Զ�����ȵ����Ӷ�����[����¼A�е�ͼS9��a��~��c��]��������ˣ��Ÿ�Ӧǿ��Ŀǰ�����Ե��½�����[����¼A�е�ͼS9��e��]����ˮ���䵽3DMD����ʱ��ͬһ���Ը˵�С�α䱻��������ϵͳ����[����¼ A�е�ͼS9��d������f��]�����ǵ����Զ������������ϱ��Ķ�����ζ�����Ը�ǿ��ʹ���Ը˸����ױ��Ρ���¼A�еı�S2֤ʵ�˸���ʵ����ʾ��ͨ����ֵ���������Ĵ�ͨ�����Ŵ��Զ�����ȵ����Ӷ����١�
���⣬���о�̽���˵��Ը�״�ײ��ĵ��Ը˳��ȣ��ó����ڵ������Զ����͵ײ���Ȧ֮��ļ�϶���ؼ����á�������ֲ��䣺�����Զ�������Ϊ������ͬ��2 mm��Ⱥ�40%�Ĵŷۺ�������ͼ5��a��~��c����ʾ��4��3DMD��ʾ����0.2~0.8 cm��Χ�ڵIJ�ͬ���Ը˳��ȡ�����ͬ�IJ��Բ����£���ˮ�ε�������Щ3DMD��ʱ����3DMD���α�ǰ���״̬��ͼ5��d��~��f����ʾ�����ͼ3��b���еĿ��գ����Ը˳��ȵ����ӿ��������3DMD�����ԣ�����������ܲ�������ǿ������[ͼ5��j������k��]��ͨ���������ȴ�0.6 cm��Ϊ0.8 cm���ɷ��ֵ�������½���ԭ���dz�ʼ��ͨ��3DMD�ڵ�һȦ��Ȧ�ĴŸ�Ӧǿ�Ƚ��ͣ��Լ���ͨ���ı仯��Ӧ����[ͼ3��d����ͼ5��i���ͱ�2]����ˣ�����������£�0.6 cm�ĵ��Ը˳��ȱ���Ϊ�Ǿ�����������ת�����ܵ����ѡ��
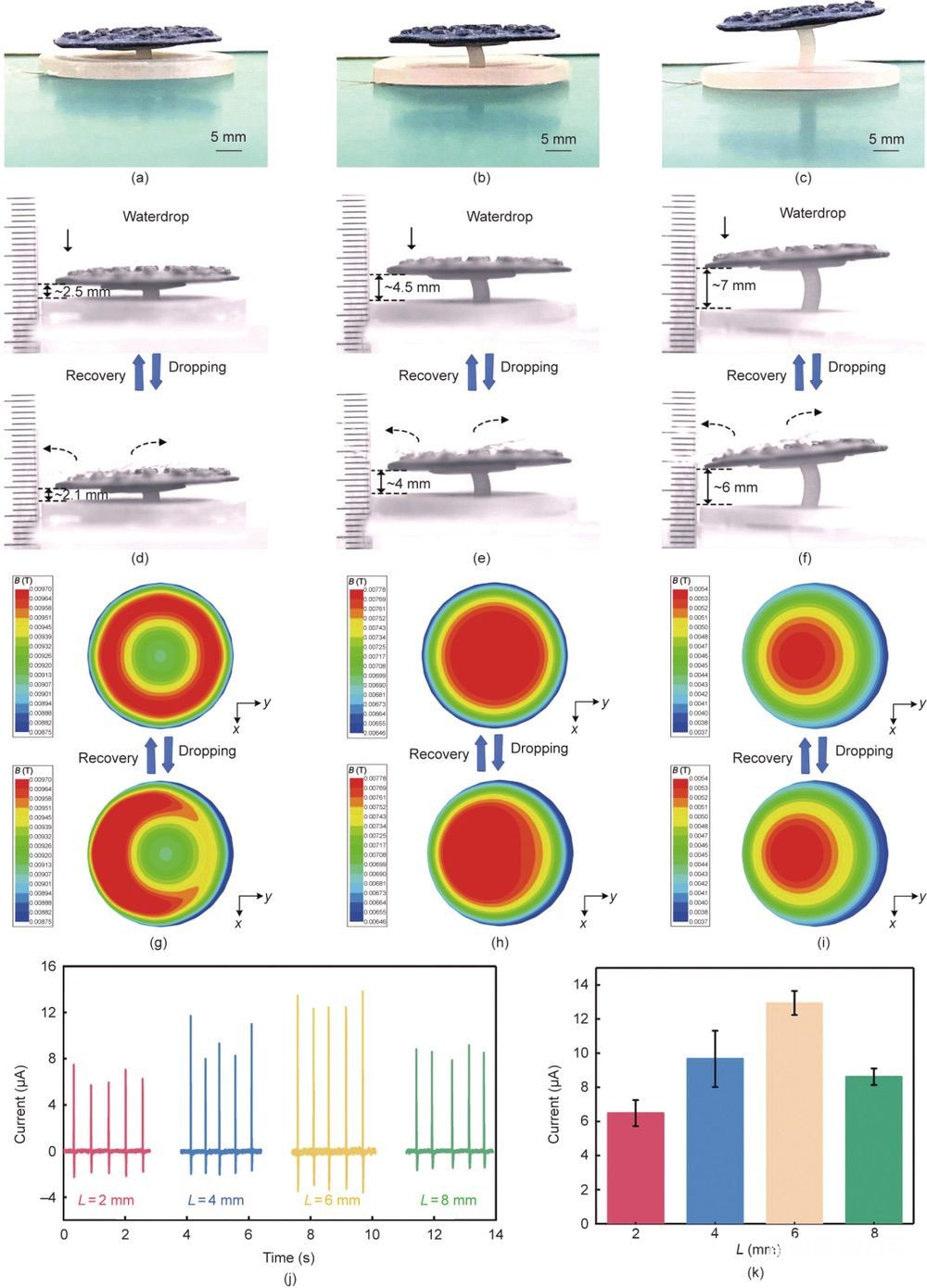
ͼ5. ���Եײ��ĵ��Ը˳��ȶ�3DMD����ת�����ܵ�Ӱ�졣����3DMD [�ֱ����0.2
cm��a����0.4 cm��b����0.8 cm��c�������Ը�]�Ĺ�ѧ��Ƭ������3DMD�Ĵ��Զ�����ͬ���Ÿ���Ϊ40%�����������������Ϊ2
mm����d������e���ͣ�f��Ϊ���ϵͳ��¼������3DMD��ˮ�ε���������α�ǰ��Ŀ��գ�ˮ�����Ϊ55 ��L������ͬ��40
cm�߶ȵ��䡣��g������h���ͣ�i��Ϊˮ�ε���֮ǰ/֮��ͨ����Ȧͬһ��Ȧ����Ӧ3D����Ÿ�Ӧǿ�ȷֲ���xyƽ�棩����j������4�ֳ��ȣ�L�����Ը˵IJ�ͬ3DMD�ĵ�����������ǵĶԱ�ֱ��ͼ�磨k����ʾ��
��2����ˮǰ���ڵ���Ԫ����ͬ���Ը˳��ȵ�4�ֲ�ͬ��3DMD�ڣ�����һȦ��Ȧ�Ĵ�ͨ��

���� = ��2 - ��1, where ��1 and ��2 represent the magnetic
flux before and after dripping, respectively. The components of these
four 3DMDs are the same except for the elastic stem-like support, and
the chosen circles of the conductive coil for the simulated calculation
have identical sizes.
��һ���о�3DMD������ת����������ʹ��ˮ�γ������䳬��250 s����ˮ3DMD������ת����Ȼ���ڣ�����ʾ�������ȶ���[ͼ6��a������b��]�����⣬�Ƴɵ�3DMD�ڴ�����ͣ��28 d����Ȼ�����൱�Ŀɿ���[����¼A�е�ͼS10]�����м������Բ�������ˮ���������ˮ�߶Ⱥ�ˮ�������ٶȣ���3DMD������ת��������������Ҫ���á����ӵ�ˮ����������߶Ȼ����������������ܣ��Ӷ����´���Ԫ���͵�����֮�������α䣬����ǿ����ת��������ͨ����Һ�������26 ��L���ӵ�55 ��L��������ֵ���ֽ���������������ͼ6��c������d����ʾ��ͬ��������ˮ�ε��ͷŸ߶���ߵ�40 cmʱ��������Ӧ������ߣ�����¼A�е�ͼS11����ͼ6��e������f���������������ֵ��ˮ�������ٶȵ�����ԡ���Ȼ����ˮ�������ٶȵ���������������������ƣ����������Ⱥ�С����ˮ�������ٶȱ仯����120 ��L��s-1ʱ�����������������2 ��A��
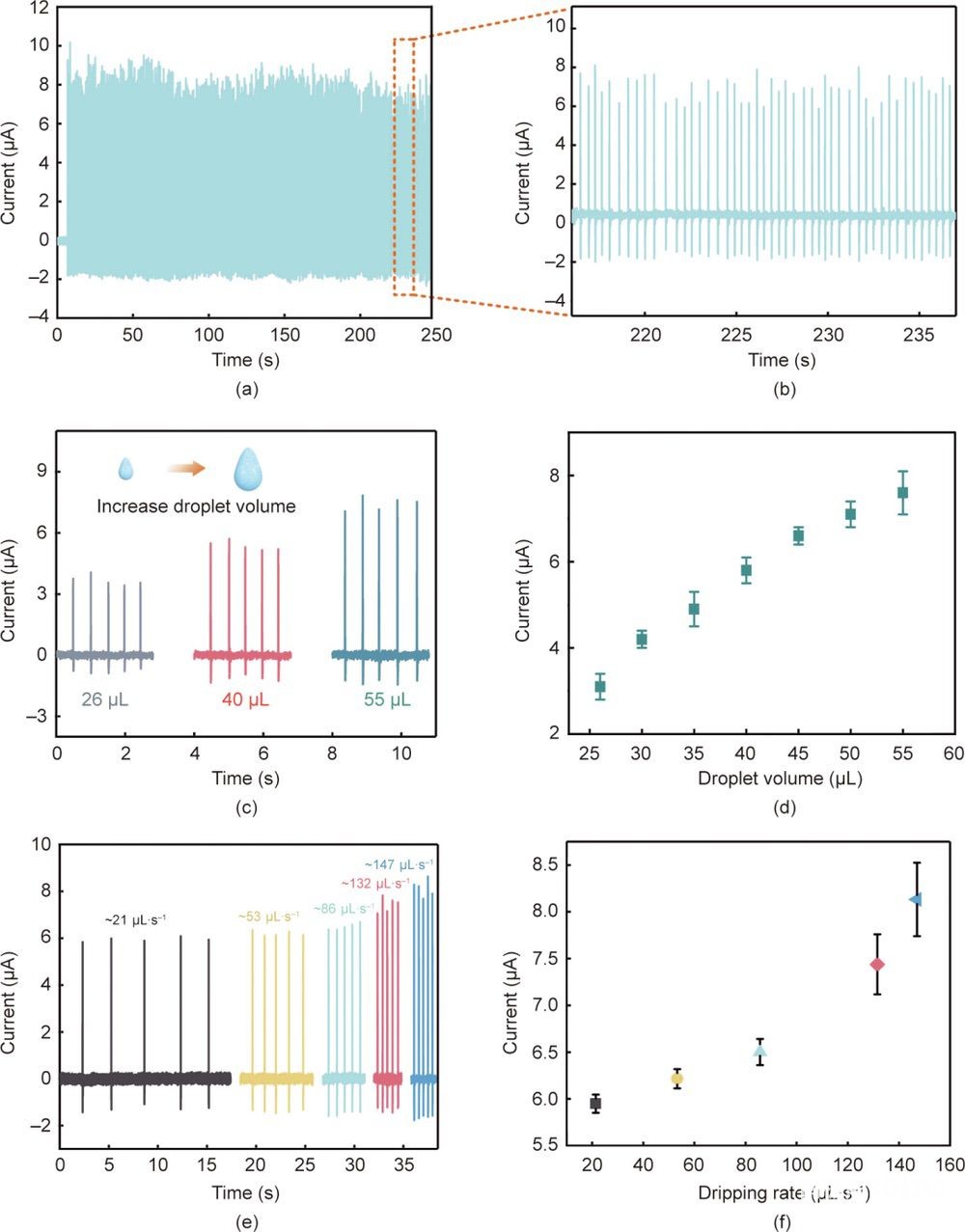
ͼ6. ��ͬ��ˮ������3DMD����ת�����ܵ�Ӱ�졣��a��������ˮ250
s���飻��b����a���ķŴ�ͼ��3DMD�ܵ�ˮ�δ�40
cm�ĸ߶��������䣻��c������ͬ�߶ȵε�3DMD�ϵIJ�ͬ���ˮ�ε��������ֵ����e��ʹ�ò�ͬˮ�������ٶ�ʱ3DMD���������ֵ����d������f���ֱ�ԣ�c���ͣ�e�����������ֵ��ֵ����ͳ�Ʒ�����
�����������ʵ��Ӧ�ã�3DMD�ɼ�������ͨ��ʹ�ô��ݶ��ռ�����ˮ����������ҵLED [ͼ7��a��]��ͨ��������3DMD�����γɴ���װ�á���ͼ 7��d����ʾ������װ�����ӵ��ɷŴ�������������Ԫ�Լ�LED��ɵĵ�·ϵͳ�ϡ����������컷������ˮ����40 cm�ĸ߶ȵ��䵽����������ʱ�����Գɹ�������ҵ��ɫLEDʵ������[��ͼ7��b����¼A�е���ƵS1]���������ִ���װ�ÿ��Խ���ˮ���Ļ�е��ת��Ϊ���ܡ����⣬���Խ���3DMD������LED����Զ�̻����г���/�����ľ����־�������Ѹ������˱����������컬����ͼ7��c����¼��������16 s�ڵĵ�����Ӧ���ڴ˹�������Ӧ���ۻ���ɼ����ﵽ40 ��C [ͼ7��d��]��
ͼ7.
���ڴ��Ժ�Ҷ�ص���������װ�õ�����ת����ʾ����a������װ��ʾ��ͼ��������3DMD��������������ݶ����µ������������b������װ�õĹ�ѧ��Ƭ������ˮ���䵽�ر�ʱ������ҵ��ɫLED����c����ˮ����ʱ�����ĵ�����Ӧ����d�����ݣ�c���еĵ���-ʱ������ת�Ƶ�ɡ���ͼ��ʾ��һ��Ԥ����Ƶĵ�·ͼ�����а���һ����ѹ����һ����������
�ġ�����
����ͨ������3D��ӡ������һ�����Եij���ˮ�ʹ���ϵͳ�������Թ��ܸ�֪�����ˮ�Ρ�3DMD���������֣������Զ����͵��Ը˵ײ��ֱ�ͨ��FDM��Polyjet�����Ʊ������ھ��г���ˮ���棬3DMD��������ˮ������±��ֳ������ȶ�������ת������������Ҫ��������Ч���͵Ĺ�/Һ𤸽�ԣ�ȷ���˴��Ժ͵���Ԫ��֮��ɿ��ľ���仯������ʵ�ַ��硣���о�Ϊ��ε��������ת�������ṩ��һ���·��������ҿ��ƹ㵽δ��������С�
(���α༭��admin)

��һƪ����������¬����Ժʿ�������춥����AM������������������������ά��ǿ5xxx���Ͻ�
��һƪ������3D�����ӡ�ĵ��ܰ�оƬ��ҩ��ɸѡ�е�Ӧ��
��һƪ������3D�����ӡ�ĵ��ܰ�оƬ��ҩ��ɸѡ�е�Ӧ��
 �Ϻ���ѧ�����½��ڵȣ�ϸ
�Ϻ���ѧ�����½��ڵȣ�ϸ Stratasys����3D��ӡ����
Stratasys����3D��ӡ���� Lilach Porges����ɽ��Ԫ
Lilach Porges����ɽ��Ԫ �����²��ܾ�������Ӣ��20
�����²��ܾ�������Ӣ��20 ¬����Ժʿ��Ҫ��̫���н�
¬����Ժʿ��Ҫ��̫���н� �Ϻ�������������ڡ��
�Ϻ�������������ڡ����������
- ���Ϻ���ѧ�����½��ڵȣ�ϸ��������
- ��Stratasys����3D��ӡ�������͵�����
- ��Lilach Porges����ɽ��Ԫ�ء�3D��ӡ��
- �������²��ܾ�������Ӣ��2024���߽���ʱ
- ��¬����Ժʿ��Ҫ��̫���н���3D��ӡ��
- ���Ϻ�������������ڡ���������Ŷӣ�
- ����Сǰ�о�Ա�Ŷӣ���߶Ƚṹ�����Ż�
- ������أ��û�����3D��ӡ��Ʒ��վ������
- �����˿�ѧ����ѡȫ��35�����´���������
- ���й���ѧԺ�˳�ȣ��ƶ�����������ī
 �п�Ժ�����Ŷ�To
�п�Ժ�����Ŷ�To ר����洴ʼ��Ҧ
ר����洴ʼ��Ҧ �㽭��ѧ��������
�㽭��ѧ�������� ���ݷɣ���������
���ݷɣ��������� ��άԺʿ�Ŷӣ�3D
��άԺʿ�Ŷӣ�3D ��½�ݽ��ڣ��߷�
��½�ݽ��ڣ��߷��ȵ�����
- ��ר����洴ʼ��Ҧ־�棬��3D��ӡ��Ʒ��
- ������Ƽ������ѡ����ʡ����֧�ƻ����Ƽ�
- ��������Ժʿ�Ŷӡ�����ʽ��������ϥ�ؽ�
- ������������ս������3D��ӡ�������
- ��������Ժʿ�Ŷӣ���������ܱ��ڹ�����
- ���廪��ѧҦѧ������Ŷӣ�3D��ӡ������
- �����ޣ��������죬ǡ����ʱ
- �������Ƽ���ѧ������Ⱥ��3D��ӡ�ھ���Ӧ
- �����Ļ���ҽѧ3D��ӡ����ƽ̨�Ľ�����Ӧ
- ������������һ�����ڡ�Nature����3D��ӡ


