���������ƾ����뻪�пƴ��ǫ����: 3D��ӡˮ���������Ĵ������������
ʱ�䣺2021-10-29 22:01 ��Դ���ϼ��� ���ߣ�admin �Ķ�����
���գ�������ͨ��ѧ�ƾ��︱���ںͻ��пƼ���ѧ��ǫ�������о��Ŷ���Wiley��������ϵͳ�����ڿ�Advanced Intelligent Systems������Ϊ��Magnetic Arthropod Millirobots Fabricated by 3D-Printed Hydrogels�� �����¡����߽�3D��ӡ�롰ģ�帨���Ż������ϣ��ڱ������ӽṹ��ͬʱ���˷���ԭλ�ų�༭�����ѡ���һ��Ϊ������������������ƽ�֫����ؽڡ��Ľṹ��ʵ���ˡ��ؽڡ���λ�Ǿ��������նȵĵ��أ�ʹ������ڽ�С�ų��������´ﵽ���ѵı���Ч�����Դ�������ڶ���νṹ������չʾ����Ӱ���ֶθ����£����ôų�ң��ˮ���������˴����IJ�ͬ�����ж�λ��ץȡ���ƶ�������������˴�����������Ϊ�����������˵�Ӧ��ǰ����
1 ���Ա��νṹ����ơ����Ϻϳ�

ͼ1 ��֫���������Ĵ�����������˵���ƺ�����
����ͨ������Ӳ���Կ�����NdFeB����3D��ӡ����ˮ�������������������ˣ�Ӳ�ſ����ɽ��дų�༭��ʹ��������Ӵų��²����ɱ�̸��ӱ��Ρ��������ؽڡ���ƽ��������г������������Σ��������巢�����Σ�ת��Ϊ�۵����Σ�����Χ�ƹؽ�ת������ʹ��ͬ�ų��µı��νǶ�����ͬʱ�������������ģ�ͼ1����
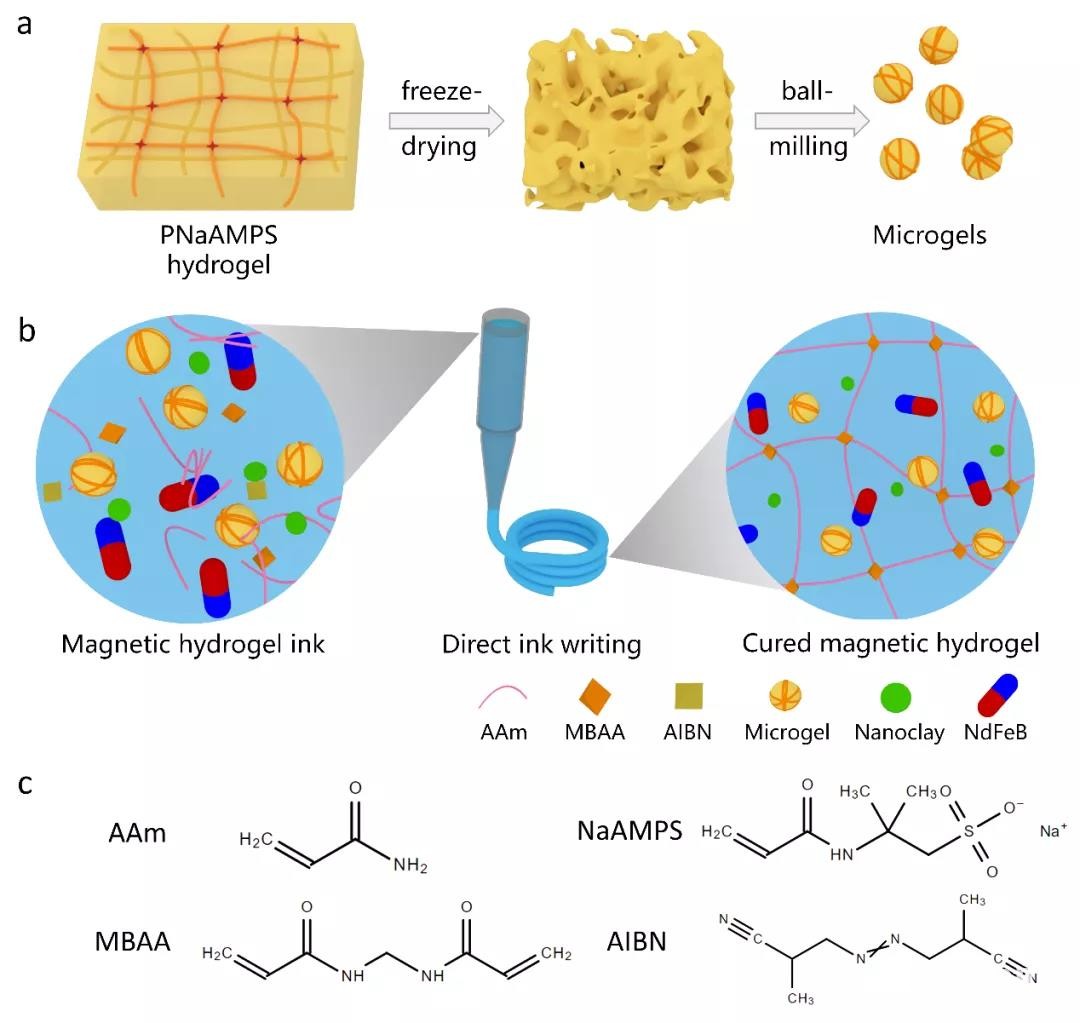
ͼ2 �����Ӳ����ˮ�����ĺϳ�
���Ϻϳ����J. Mater. Chem. B, 2021, DOI: 10.1039/D1TB01694F��https://pubs.rsc.org/en/content/articlelanding/2021/TB/D1TB01694F������Ӳ����ˮ����������ˮ������ͬʱ��˫�������͡�������3D��ӡ��Ч����ȷ����Ӳ�ſ�����ˮ���������еľ��ȷֲ����ų�༭��ͼ2����
�����о��˴����������Ļ�����ѧ�ṹ�����������ڴų��µı�����Ϊ��ͼ3������ͨ��ʵ�����ֵ�����Ա����������۵����ֱ���ģʽ������ͬ���ų��£��۵�ģʽ�ı��νǶȸ���֤���˹ؽ���Ƶ���Ч�ԣ�̽�����ۺۼ��β�����Ӱ�죬Ϊ�˺�Ļ����˽ṹ����ṩ���������ݡ�
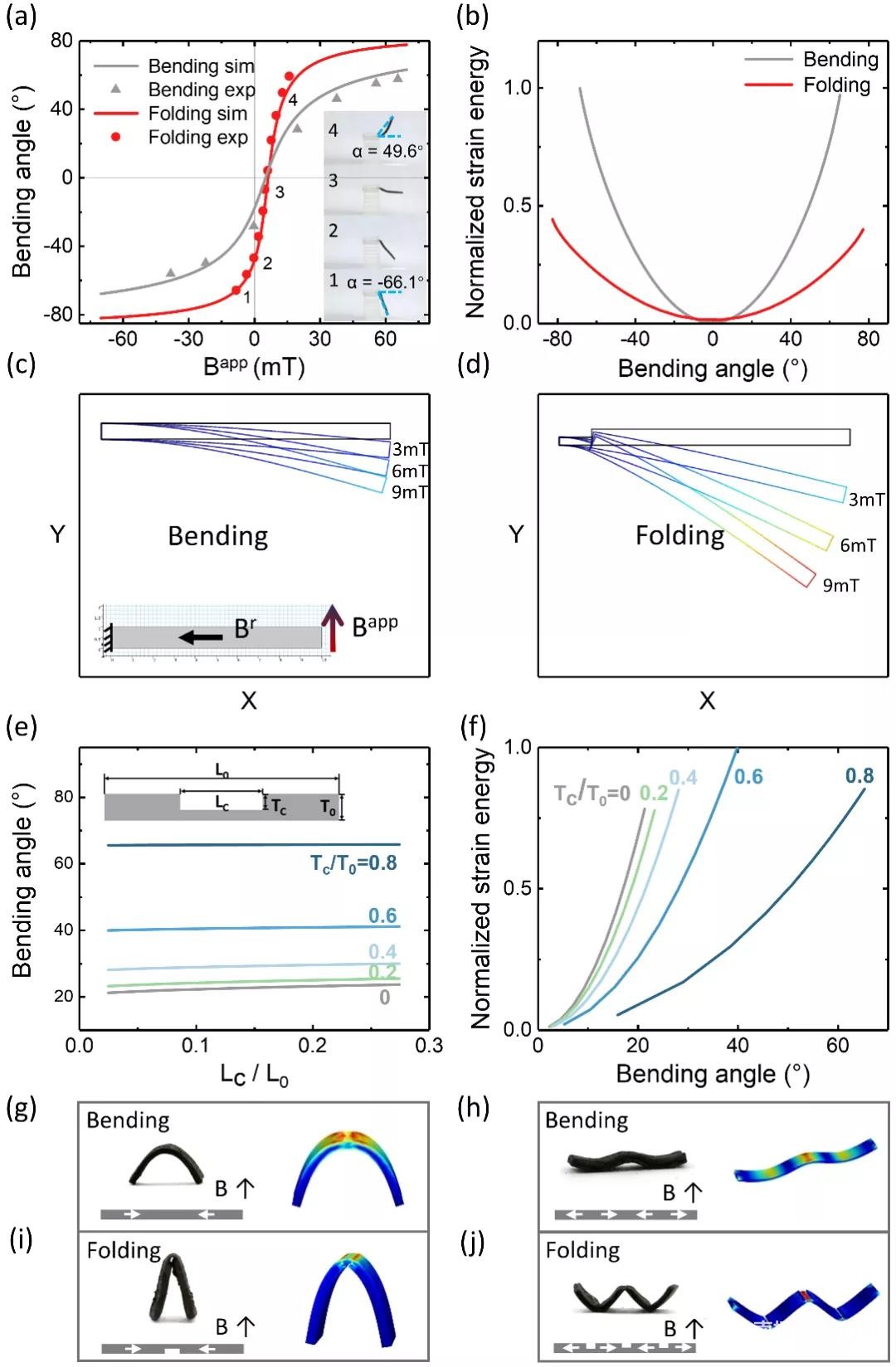
ͼ3 ������������˵Ļ����ṹ��Ԫ�����о�
2 ������������˵��������κ�Ӧ��չʾ
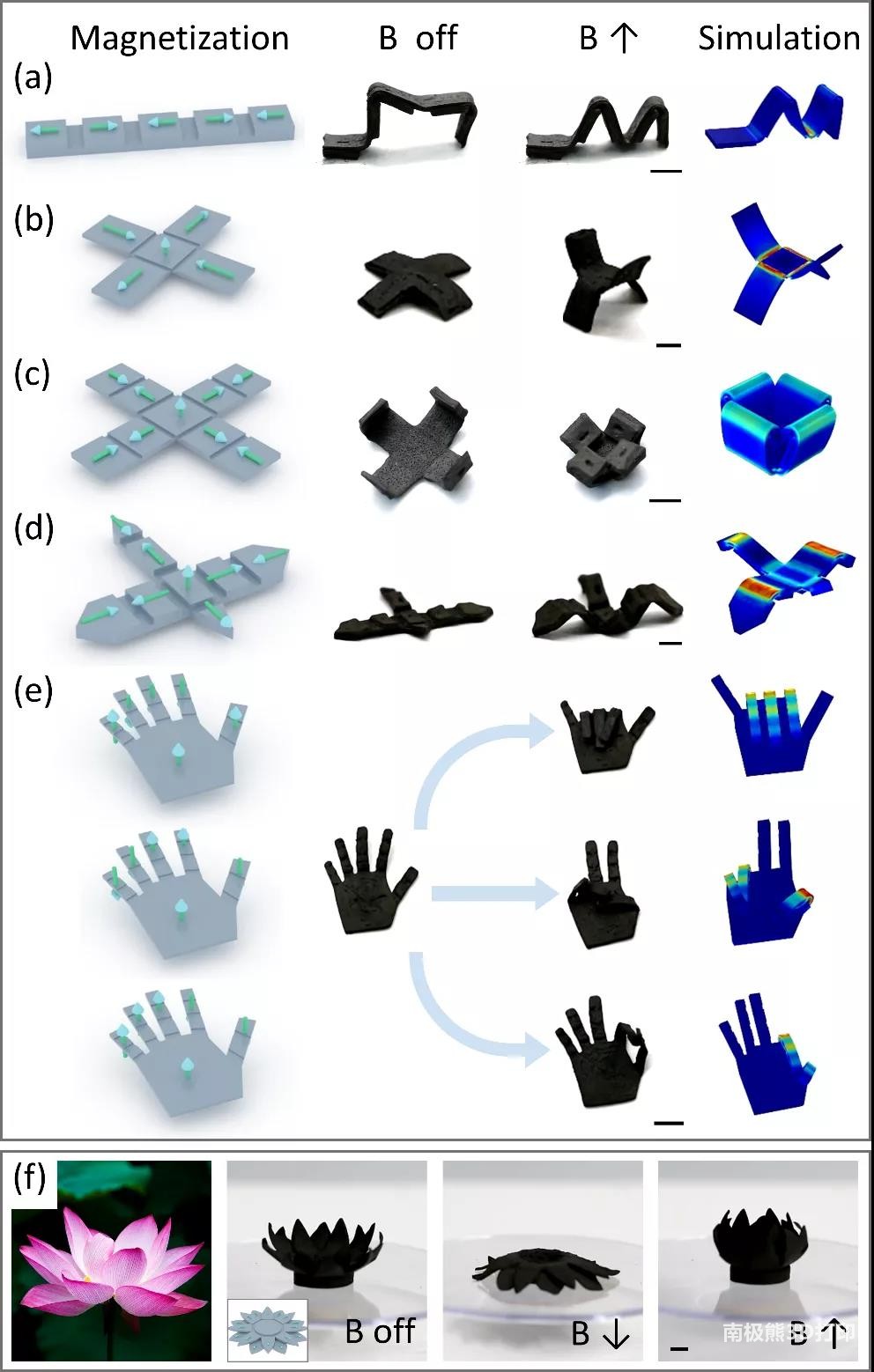
ͼ4 ���ۺ۵Ĵ��Ա��νṹ
����ʵ���˶��ִ��Ա��νṹ�ڴų������µĿ��١����ظ�����������ͼ4��������������Ԫ��������Ԥ�����������ı��Ρ���һ�����������һ�����ۻ����ˣ����ж��ֲ�ͬ����̬��ƽ�̡�վ������£�������ڴų��������ڲ�ͬ��̬֮��ת�䣨ͼ5������Ӧ�ٶȼ��죨1�����ڣ������������Ĵ�С��ָ���൱��~10mm����
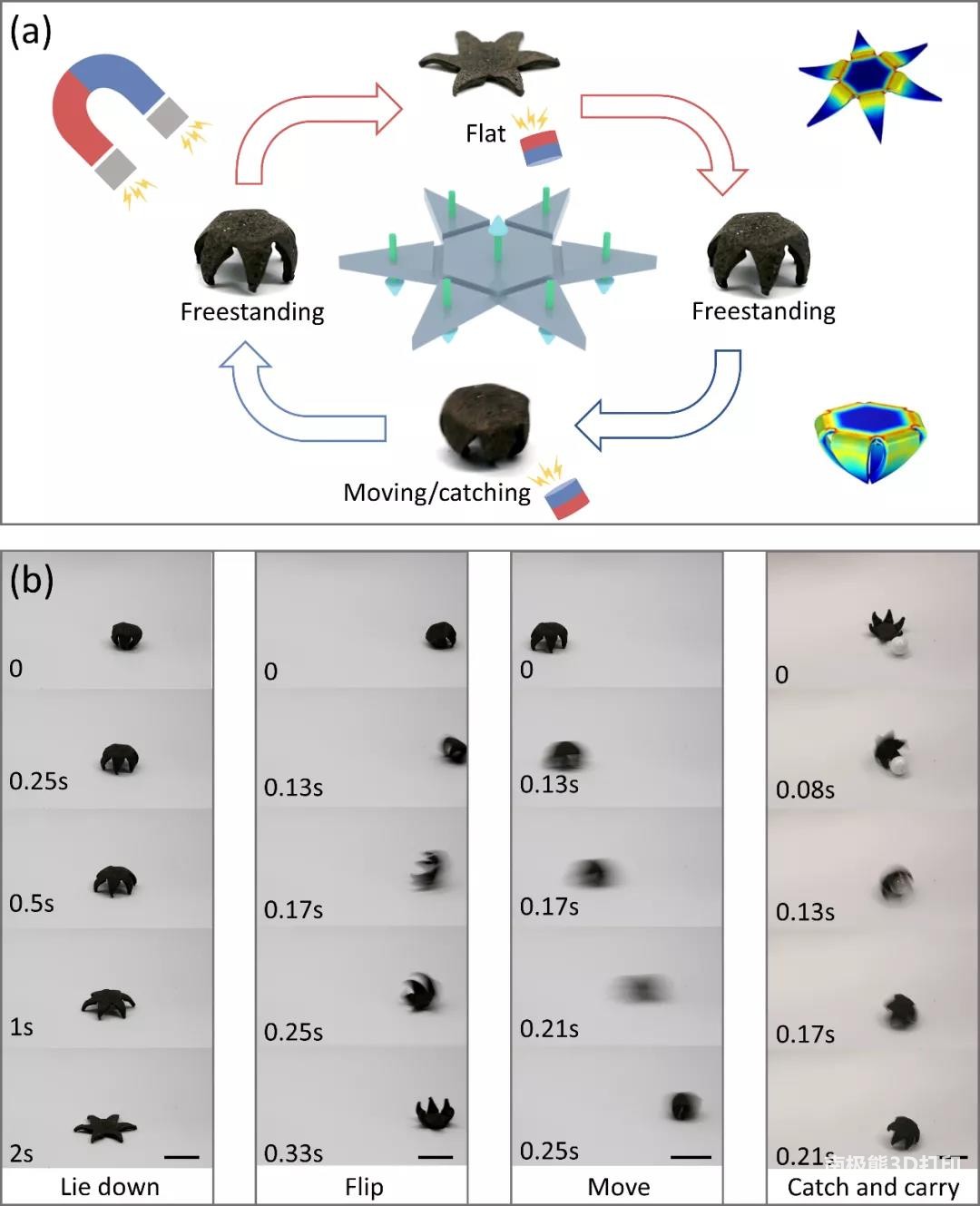
ͼ5 �ų������¾��ж����˶�ģʽ���������������
�����������ۻ����ˣ�����չʾ�˴�����������һ��DZ��Ӧ�ã�ͼ6����Ԥ�Ƚ�һ�����Ǧ˿���Ž�����������У���������θ�ʹ������ڿ���Ӱ��ĸ����£����ۻ����������ɴų�ң�����������ƶ����Ҷ�λĿ�꣬������ñ���������ɶ�Ŀ������IJ�������ڴų��ĵ�����Я������ǰ��ָ���ص㡣������Ӳ���Բ��϶���Ӵų��Ŀ�����Ӧ������ʵ����̿����ڼ�����֮����ɣ����Ҵ���ˮ�������нϵ͵�ϸ�����ԡ�
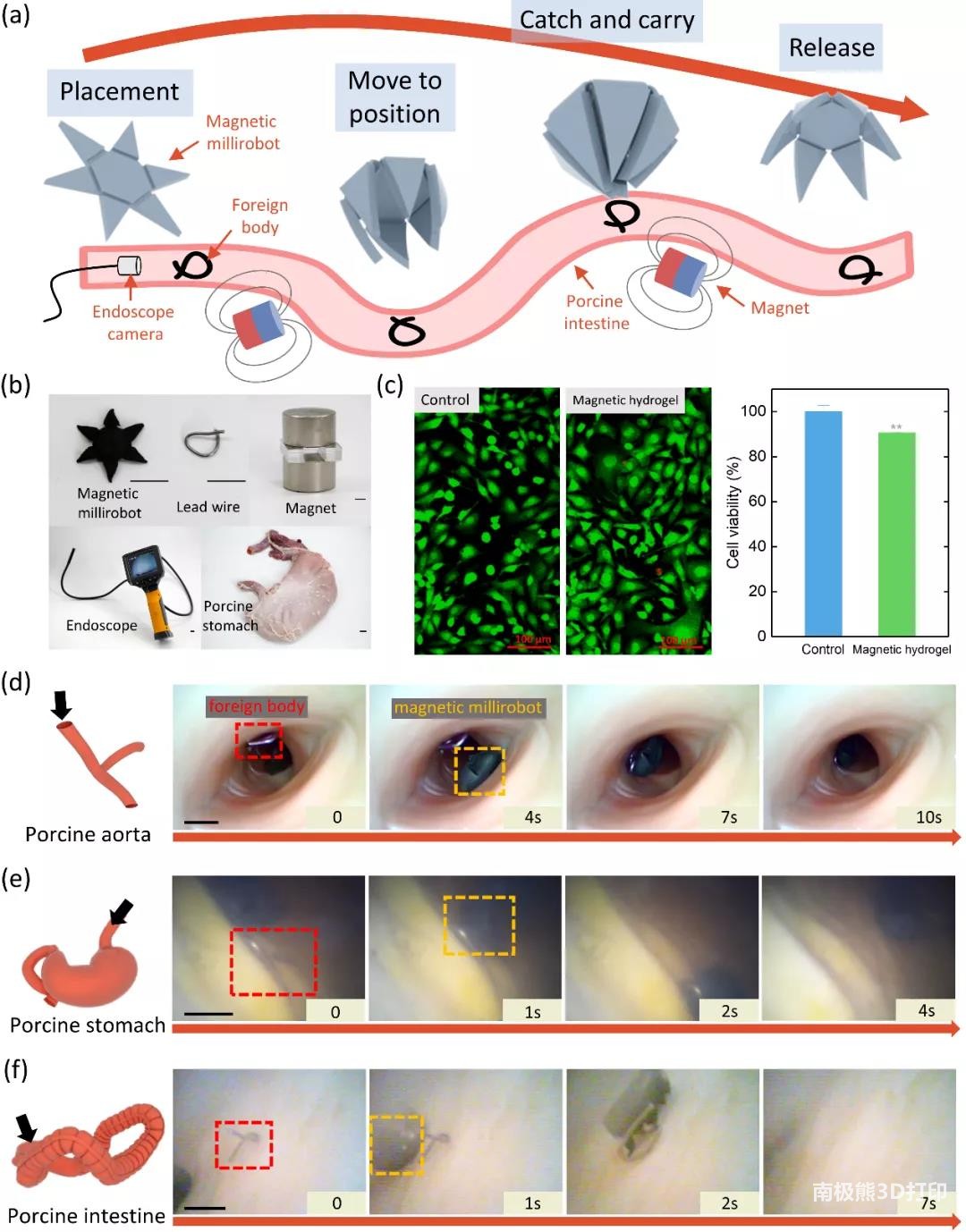
ͼ6 ���������������ڹ�ǻ�е�����ץȡ
���Ĺ�ͬ��һ������������ͨ��ѧ��������ѧԺ˶ʿ�о����ﲮ�кͼ��٣�ͨѶ������������ͨ��ѧ�ƾ��︱���ںͻ��пƼ���ѧ��ǫ�����ڡ� ������ͨ��ѧ��е�ṹǿ���������ص�ʵ����Ϊ��һ��λ�������о��õ��˹�����Ȼ��ѧ�����ص���ʣ������������о���Ŀ���Ƽ����ص��з��ƻ������䴴�º�����Ŀ��������Ŀ��������Ŀ��������
�������ӣ�Bonan Sun, Rong Jia, Hang Yang, Xi Chen, Kai Tan, Qian Deng, Jingda Tang, Magnetic Arthropod Millirobots Fabricated by 3D-Printed Hydrogels. Advanced Intelligent Systems, 2021, 2100139.
https://onlinelibrary.wiley.com/doi/full/10.1002/aisy.202100139
(���α༭��admin)

 �Ϻ���ѧ�����½��ڵȣ�ϸ
�Ϻ���ѧ�����½��ڵȣ�ϸ Stratasys����3D��ӡ����
Stratasys����3D��ӡ���� Lilach Porges����ɽ��Ԫ
Lilach Porges����ɽ��Ԫ �����²��ܾ�������Ӣ��20
�����²��ܾ�������Ӣ��20 ¬����Ժʿ��Ҫ��̫���н�
¬����Ժʿ��Ҫ��̫���н� �Ϻ�������������ڡ��
�Ϻ�������������ڡ����������
- ���Ϻ���ѧ�����½��ڵȣ�ϸ��������
- ��Stratasys����3D��ӡ�������͵�����
- ��Lilach Porges����ɽ��Ԫ�ء�3D��ӡ��
- �������²��ܾ�������Ӣ��2024���߽���ʱ
- ��¬����Ժʿ��Ҫ��̫���н���3D��ӡ��
- ���Ϻ�������������ڡ���������Ŷӣ�
- ����Сǰ�о�Ա�Ŷӣ���߶Ƚṹ�����Ż�
- ������أ��û�����3D��ӡ��Ʒ��վ������
- �����˿�ѧ����ѡȫ��35�����´���������
- ���й���ѧԺ�˳�ȣ��ƶ�����������ī
 �п�Ժ�����Ŷ�To
�п�Ժ�����Ŷ�To ר����洴ʼ��Ҧ
ר����洴ʼ��Ҧ �㽭��ѧ��������
�㽭��ѧ�������� ���ݷɣ���������
���ݷɣ��������� ��άԺʿ�Ŷӣ�3D
��άԺʿ�Ŷӣ�3D ��½�ݽ��ڣ��߷�
��½�ݽ��ڣ��߷��ȵ�����
- ��ר����洴ʼ��Ҧ־�棬��3D��ӡ��Ʒ��
- ������Ƽ������ѡ����ʡ����֧�ƻ����Ƽ�
- ��������Ժʿ�Ŷӡ�����ʽ��������ϥ�ؽ�
- ������������ս������3D��ӡ�������
- ��������Ժʿ�Ŷӣ���������ܱ��ڹ�����
- ���廪��ѧҦѧ������Ŷӣ�3D��ӡ������
- �����ޣ��������죬ǡ����ʱ
- �������Ƽ���ѧ������Ⱥ��3D��ӡ�ھ���Ӧ
- �����Ļ���ҽѧ3D��ӡ����ƽ̨�Ľ�����Ӧ
- ������������һ�����ڡ�Nature����3D��ӡ


