�����3D��ӡ���ж�ģʽ���й��ܵ����ӵ��ݴ�����
ʱ�䣺2024-04-03 10:43 ��Դ���߷��ӿƼ� ���ߣ�admin �Ķ�����
�Ϸ��Ƽ���ѧ��ѧ�뺽�պ��칤��ϵ��ӻ��Ŷ����е����Դ����ϵ����Ŷӣ�������ͨ������Ϲ�̻�3D��ӡ����һ�廯���������ھ۵���ʵ�����Ķ�ģʽ�������ӵ��ݴ�����������˴�ͳ��紫�����ȶ��Բ�����Ե�һ�����⣬Ϊ��������紫��������ơ�������Ӧ���ṩ���µĽ��������
����о��ɹ��ԡ�Polyelectrolyte elastomer-based ionotronic sensors with multi-mode sensing capabilities via multi-material 3D printing��Ϊ�ⷢ���ڡ�Nature Communication���ڿ����Ϸ��Ƽ���ѧ����������ƴϡ���ʿ���̽���ͺ��ŷ�Ϊ���Ĺ�ͬ��һ���ߣ���ӻ������������蟽���Ϊ���Ĺ�ͬͨѶ���ߡ����о��õ�����������������ѧ�������ص�ʵ���Һ㶫ʡ��Ȼ��ѧ�������Ŀ֧�֡�
��ͼ1��ʾ��������Ƥ����������ѹ��Ť������ϵ������Ķ�ģ̬��֪�������������о���Ա���ö���Ϲ�̻�3D��ӡ�����Ʊ��˾��ж�ģʽ������������紫�����������������˾۵���ʵ����壨PEE������߷��������к��й̶��������ӻ������ӣ��Լ����ƶ��ķ����ӣ��߱�������й©�����ԡ��ڴ�ӡ�����У�PEE�����봫�����ϵĽ�絯���壨DE������֮��ͨ�����ۺ����˻����γ����ι̵Ľ���ճ�ӡ�
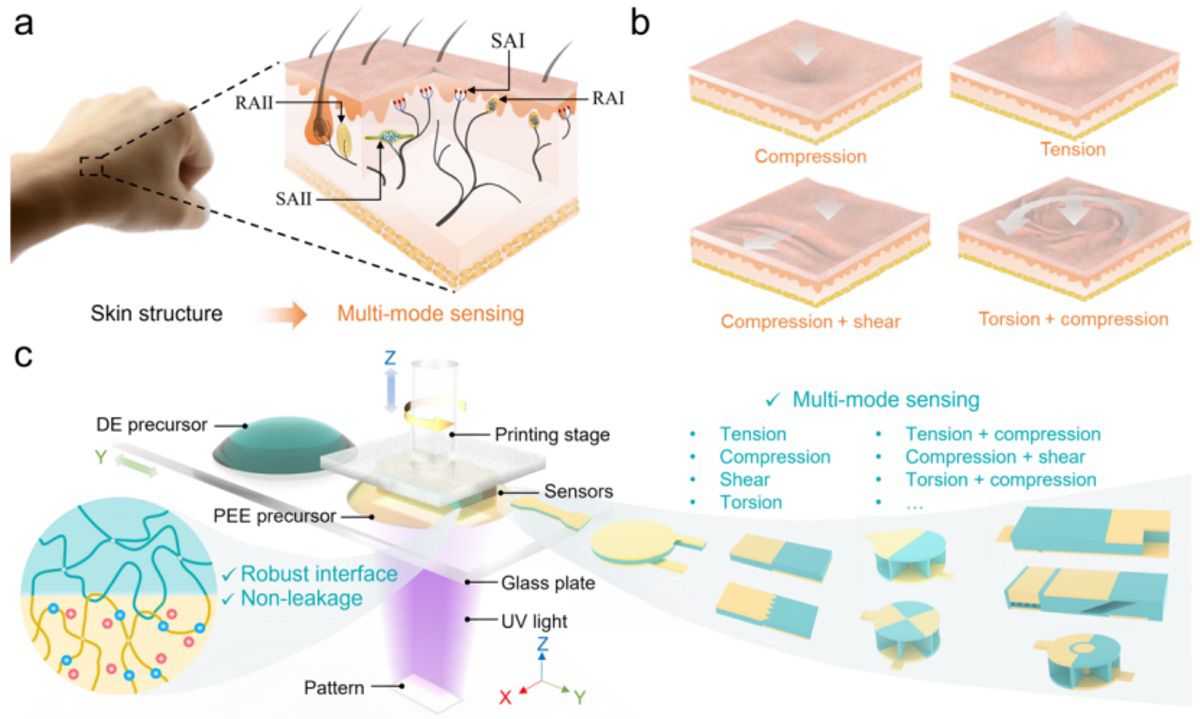
ͼ1. Ƥ�������Ķ�ģʽ������紫������(a) ����Ƥ���ڶ�����������ʾ��ͼ��(b) ����Ƥ�����Ը�֪��һ����ѧ�ź���ѹ����ѹ��ѹ+����ѹ+Ť��(c) ���ڶ�������ֹ�̻�3D��ӡ�����Ʊ����ж�ģʽ������������紫������
�о���Ա���Ⱥϳ���һ����Ϊ1-����-3-������134-3-�DZ�����ϩ������BS���ĵ��壬��Ϊ�۵���ʲ��ϵ���ɳɷ�֮һ��������һ����ΪMEA����ˮ����һ����й��ۡ�Ȼ��ͨ���Ż�BS��MEA�ı�����ƽ��۵���ʲ��ϵ���ѧ���ܺ͵�ѧ���ܣ��Ӷ��Ż������������ܣ���ͼ2��ʾ��
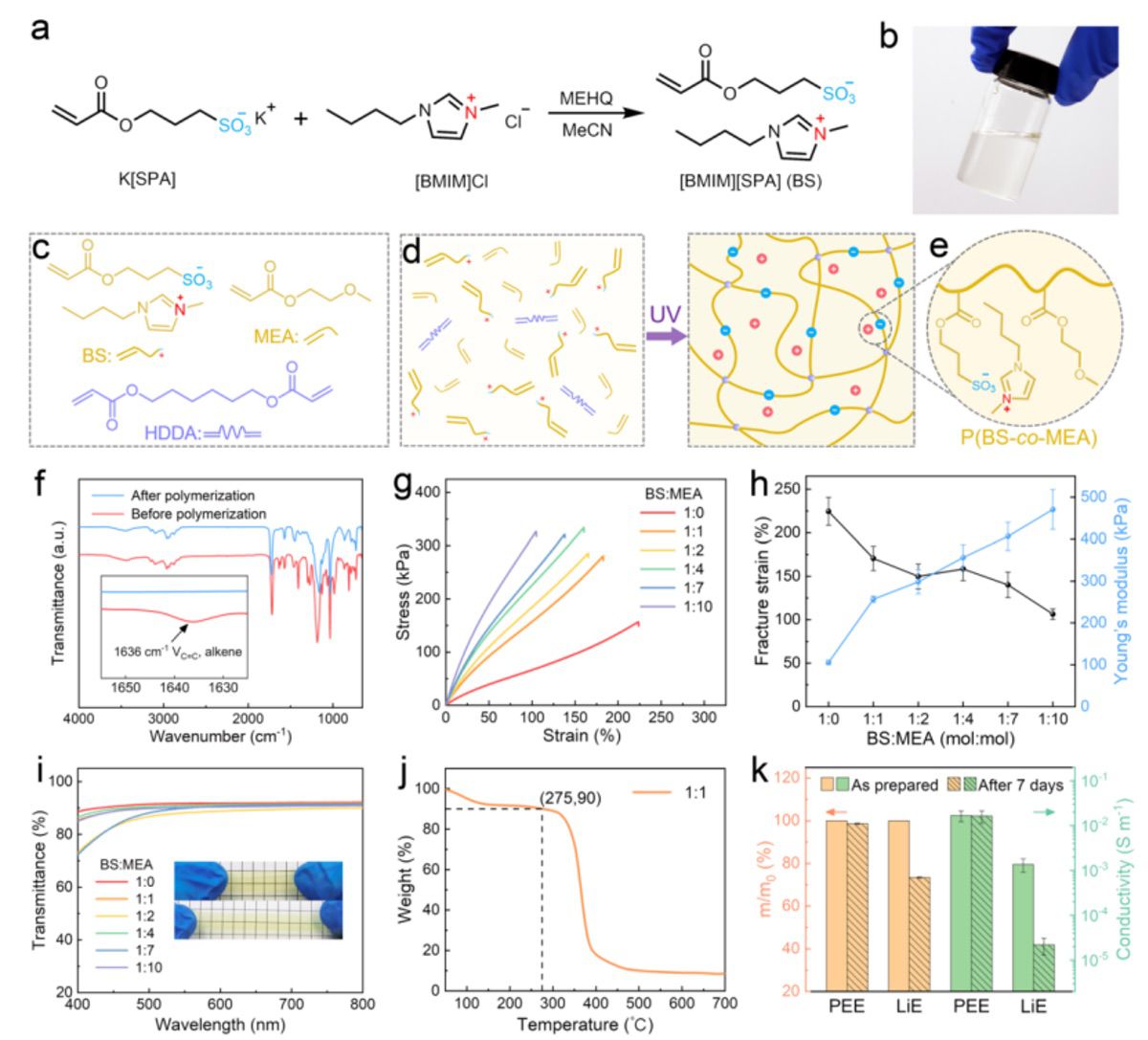
ͼ2. �۵���ʵ��������ơ��Ʊ����ѧ����ѧ����ѧ�����Լ��ȡ��ܼ��ȶ��ԡ�
��ͼ3��ʾ���о���Ա���й����������֤����������PEE���ϵĿɴ�ӡ�ԡ�Ȼ��ͨ��180�������ԣ��ֱ������3D��ӡ���ֶ���װ��PEE/DE˫��ṹ�Ľ���ճ��ǿ�ȡ����������3D��ӡ��˫��ṹ����PEE��DE֮���γɵĹ��ۼ������˲��������ǿ�͵Ľ��棬������̷�����PEE���ϵı������, ճ���ܴ�339.3 J/m2�����֮�£��ֶ���װ��PEE/DE˫��ṹ��������������̷����˽�����ѣ�ճ����ֻ��4.1 J/m2�����;öȲ����У�����PEE�ĵ���ʽ����������������й©���Գ�ʱ�䱣���ȶ����źţ������ڴ�ͳ��LiTFSI�������ӵ�����Ĵ�������������й©���źų�������Ư�ƣ�ֱ��������·��
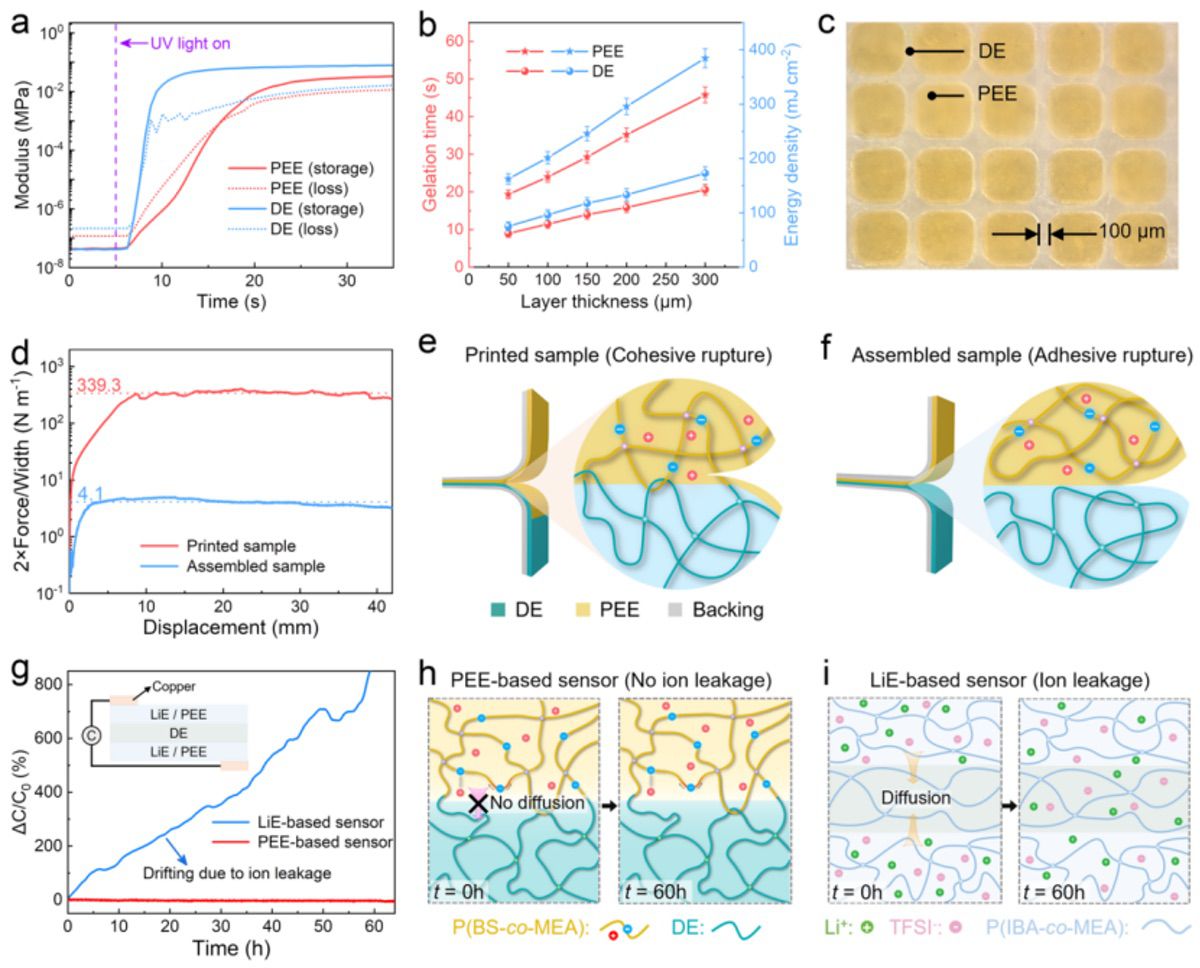
ͼ3. ��紫�����Ŀɴ�ӡ�������ܡ�(a)
PEE�洢ģ�������ģ�����̻�ʱ��ı仯���ߡ�(b) �̻�ʱ���������ܶ�����ı仯��ϵ��(c) ��ӡ��PEE����չʾ��(d)
3D��ӡ���ֶ���װ��PEE/DE˫��ṹ��180��������ߡ�(e) 3D��ӡ��PEE/DE˫��ṹ�������ʾ��ͼ��(f)
�ֶ���װ��PEE/DE˫��ṹ�������ʾ��ͼ��(g) ����PEE�ͻ���LiTFSI�������ӵ�����ĵ���ʽ�������Ħ�C/C0��ʱ��仯���ߡ�(h)
����PEE�ĵ���ʽ������������й©��(i) ����LiTFSI�������ӵ�����ĵ���ʽ����������й©ʾ��ͼ��
3D��ӡ����Ϊ�����Ľṹ����ṩ�˼��ߵ�����ԡ���ͼ4��ʾ���о���Ա�ֱ���Ʋ�һ�廯��ӡ�����졢ѹ�������С�Ťת���ֲ�ͬ����紫�������������������õ����ܺ��ȶ��ԡ��ر�أ�ͨ�������Ľṹ��ƣ�������ʵ�ִ����������ȵĴ�����Ż�������ͨ����ѹ���������Ľ�絯����������ṹ���Խ�����������������������ֿ���ʵ�ִ����������ȵİ�����أ�����ͨ����Ƽ��д�����ǰ�˵�������Ťת�����������������������Էֱ�ʵ�ֲ�ͬ��Ӧ�ļ��д�������Ťת��������
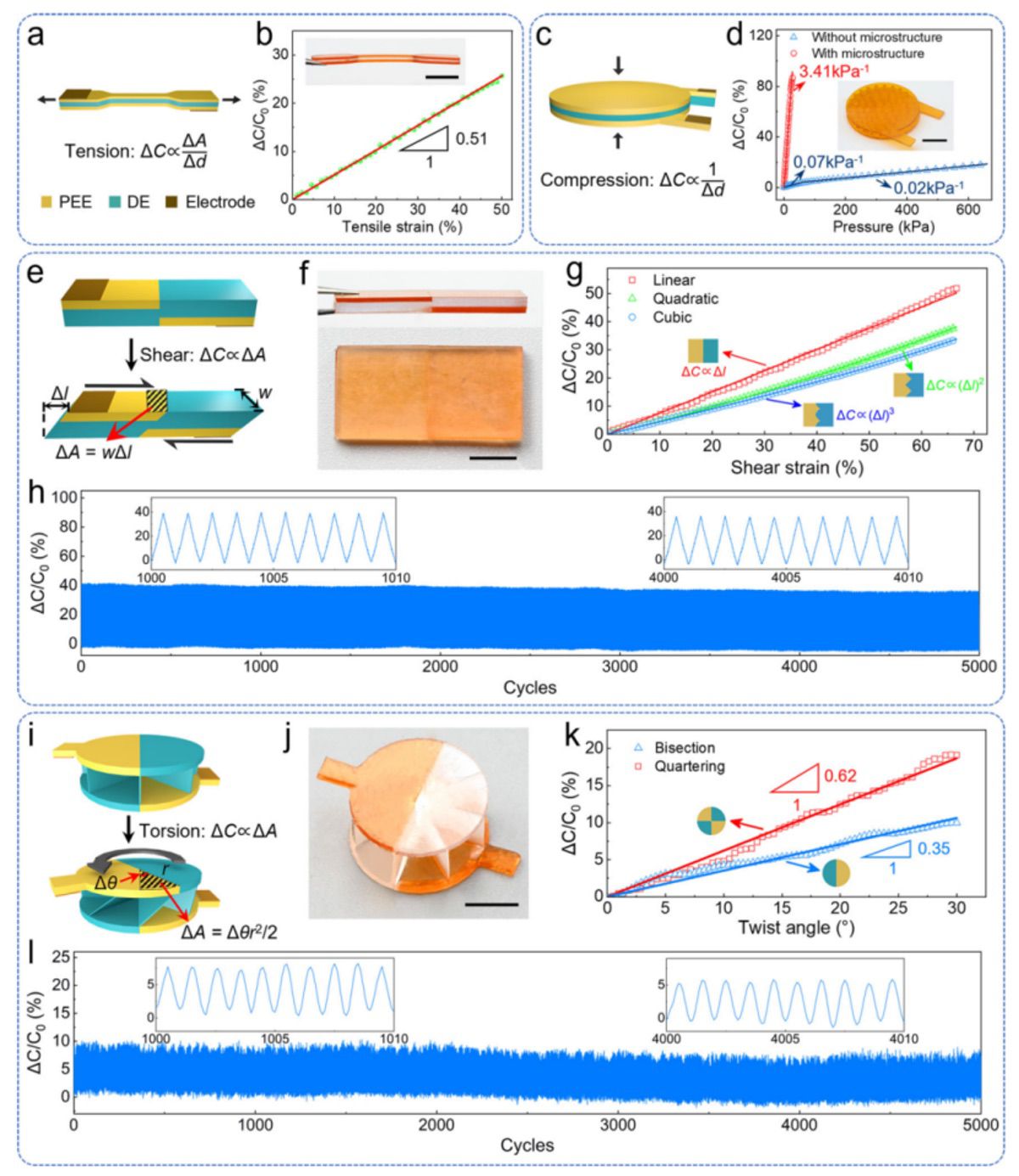
ͼ4. ���졢ѹ�������С�Ťת��紫������(a) ���촫����ԭ��ʾ��ͼ��(b)
����-����Ӧ�����ߡ�(c) ѹ��������ԭ��ʾ��ͼ��(d) ��/���ṹ��ѹ���������ĵ���-ѹ�����ߡ�(e) ���д�����ԭ��ʾ��ͼ��(f)
һ�ּ��д�����ʵ��ͼ��(g) ��ͬ�����ȵļ��д������ĵ���-����Ӧ�����ߡ�(h) ���д�������ƣ�Ͳ������ߡ�(i) Ťת������ԭ��ʾ��ͼ��(j)
һ��Ťת������ʵ��ͼ��(k) ��ͬ�����ȵ�Ťת�������ĵ���-Ťת�����ߡ�(l) Ťת��������ƣ�Ͳ������ߡ�
��ͼ5��ʾ���о���Ա��һ����Ʋ�һ�廯��ӡ����ѹ��ѹ����ѹŤ�������ʽ��紫���������ʽ������������ս֮һ���ڲ�ͬ����ͨ·֮������źŴ��ţ����磬����������ʱ�����ڲ��ϵIJ���ЧӦ�ᵼ�´�ֱ�����ϵ��������γߴ���С����Ч��ѹ�����Σ��������켤������ѹ��ͨ�����źű仯���о���Ա�������Ԫģ�������ͨ�������������ṹ��ƣ���Ч�ر����˲�ͬͨ��֮����źŴ��š�
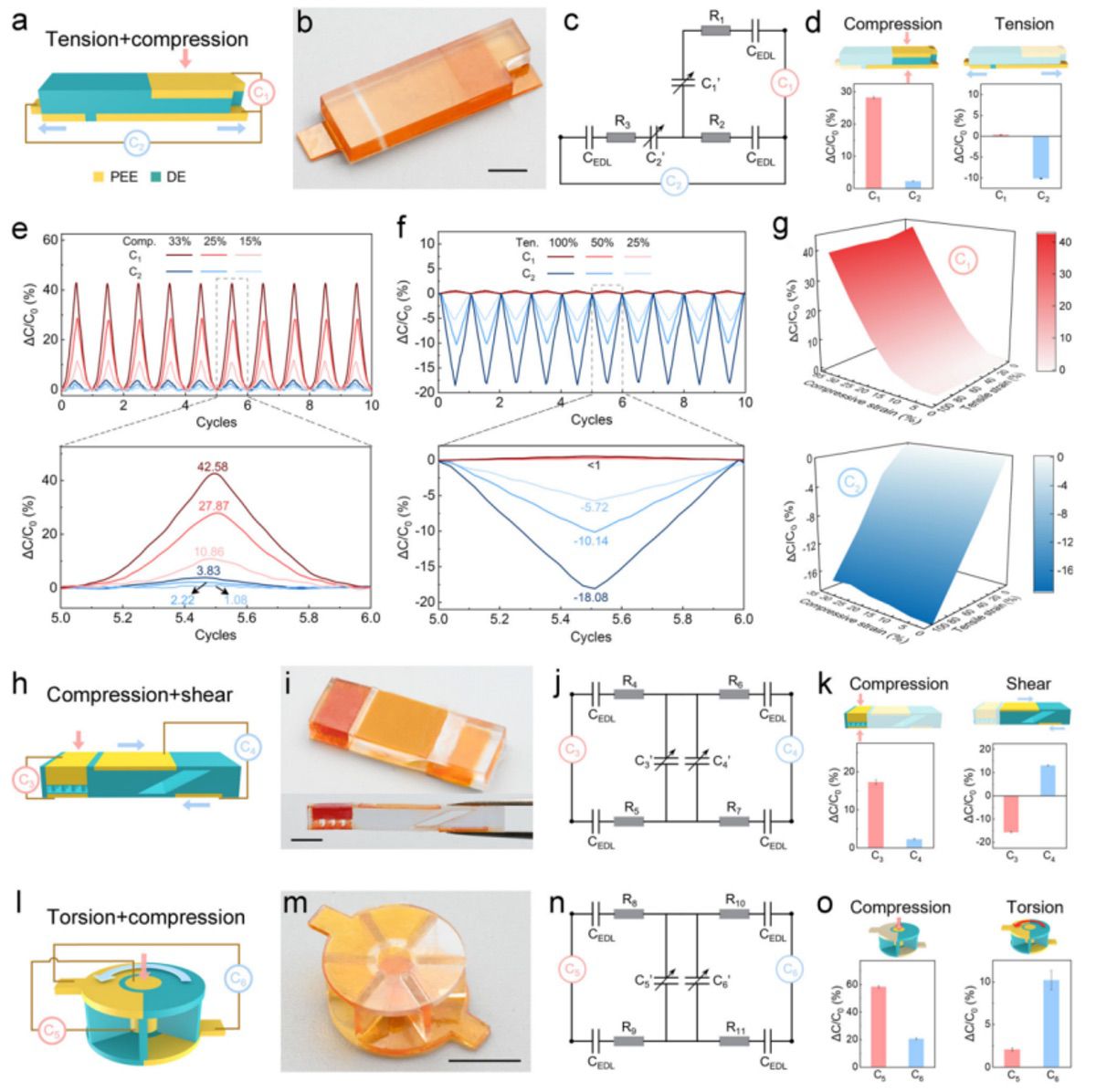
ͼ5. ���ʽ��紫������(a) ��ѹ��ϴ�����ʾ��ͼ��(b) ����ʵ��ͼ��(c)
��ѹ��ϴ�������Ч��·ͼ��(d) ��һ����ģʽ�µ������źš�(e) ѹ�������µĵ���-Ȧ���仯���ߡ�(f)
���켤���µĵ���-Ȧ���仯���ߡ�(g) ��ѹ��ϱ����µ��ź��ס�(h) ѹ����ϴ�����ʾ��ͼ��(i) ����ʵ��ͼ��(j)
ѹ����ϴ�������Ч��·ͼ��(k) ��һ����ģʽ�µ������źš�(l) ѹŤ��ϴ�����ʾ��ͼ��(m) ����ʵ��ͼ��(n)
ѹŤ��ϴ�������Ч��·ͼ��(o) ��һ����ģʽ�µ������źš�
����о���Աչʾ��һ�����ĸ����д�������һ��ѹ����������ɵĿɴ���ң�ص�Ԫ�����������ӵ�һ��Զ�̿���ϵͳ������Զ�����߿������˻��ķ��У���ͼ6��ʾ������ɴ���ң�ص�Ԫ�е��ĸ����д����������֪�ֲ�����ָ�˶������ڿ������˻��ķ���ѹ�������������ڸ�֪��ָ��ѹ�����������˻��ķ��������ֿɴ���ң�ص�Ԫ����ƿ���ʵ���˻��������ṩ�������Ŀ��Ʒ�ʽ��
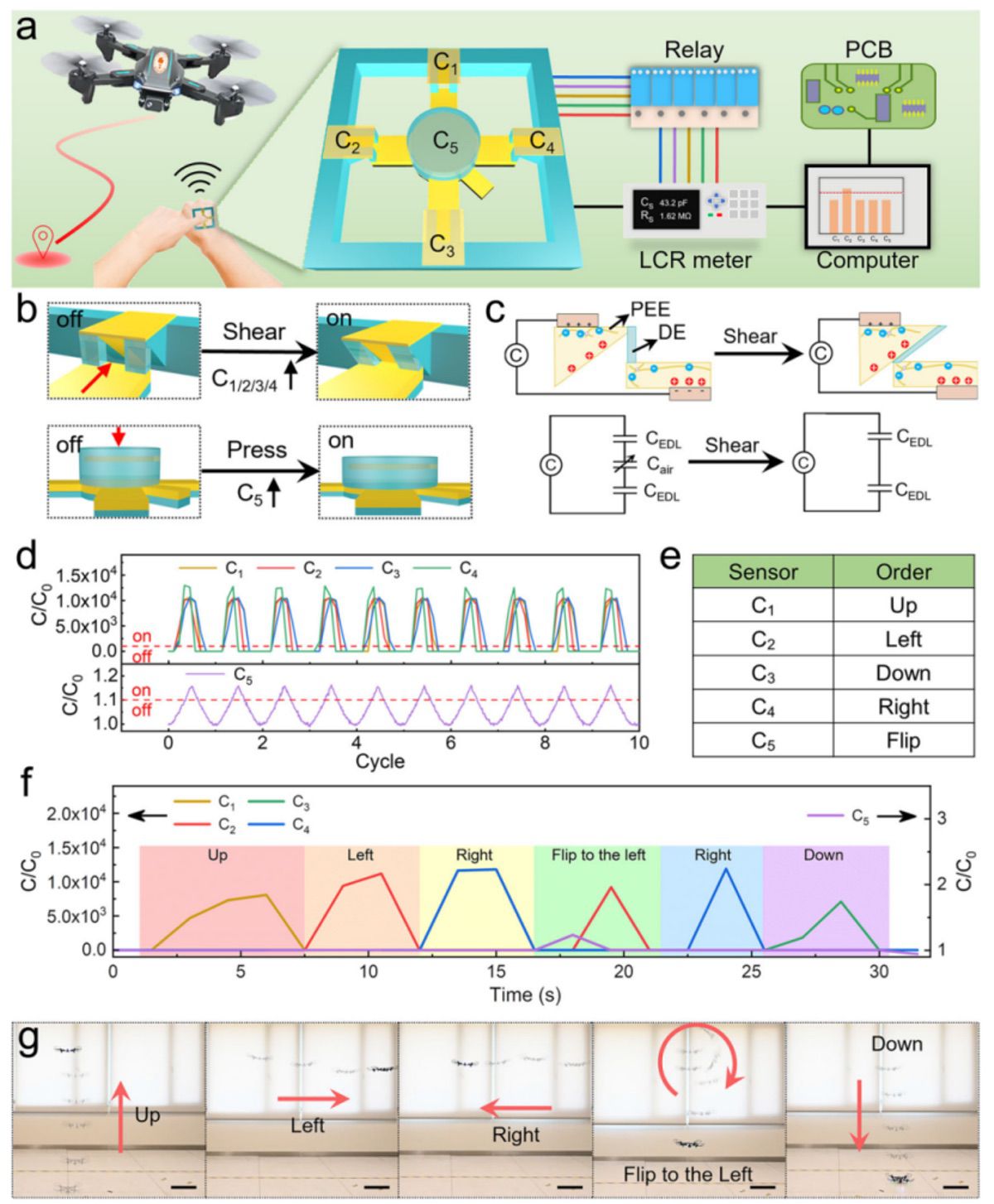
ͼ6. ���ʽ��紫�����������˻���Զ�����߲ٿء�(a) ���˻�����ϵͳʾ��ͼ��(b)
���ʽ��紫�����м��д���ģ�鹤��ģʽʾ��ͼ��(c) ���д���ģ�鹤��ԭ����(d) ���������ͨ�������źŲ��ԡ�(e) ָ���������(f)
���ʽ��紫����ʵʱ�����źš�(g) ��ͬʱ�̵����˻�����״̬��
�������ӣ�
https://doi.org/10.1038/s41467-023-40583-5
(���α༭��admin)

��һƪ��3D��ӡ�մ���о�����ѹ���ֵ���ҶƬ����ʽ����Ӧ�ã���������ȡ��ͻ��
��һƪ���Ϻ���������һ��IEMAI������˹�ĸ����ܾۺ���3D��ӡ�������
��һƪ���Ϻ���������һ��IEMAI������˹�ĸ����ܾۺ���3D��ӡ�������
 CNES����INTAMSYS�ۺ���FF
CNES����INTAMSYS�ۺ���FF ���������ݲ��������Ե���
���������ݲ��������Ե��� ����3D��ӡ��������Ӧ�ã�
����3D��ӡ��������Ӧ�ã� MIT��ͻ�ƣ�����뵼��Ҳ
MIT��ͻ�ƣ�����뵼��Ҳ ����ѷ��HolcimͶ��14Tree
����ѷ��HolcimͶ��14Tree ����SLS 3D��ӡ�������ϣ�
����SLS 3D��ӡ�������ϣ���������
- ��CNES����INTAMSYS�ۺ���FFF��������
- �����������ݲ��������Ե�����-��ֽ��״
- ������3D��ӡ��������Ӧ�ã��ⳡ�Ϸ�Ƥ��
- ��MIT��ͻ�ƣ�����뵼��Ҳ��3D��ӡ����
- ������ѷ��HolcimͶ��14Trees�ƶ�������
- ������SLS 3D��ӡ�������ϣ����´�ӡ���
- ��Elastium��LaLaLand�Ƴ�No-MMOQ���3D
- ��ͨ�켯�����۶�Ͷ������½����¹��״�
- ��3D��Դ�������ӡ��С�ܼ���ģ������ģ
- �����Ͷ�����ILT�о�3D��ӡ���ŷ��ⷢ��
 ��Small Science
��Small Science ��������-���Ŵ�
��������-���Ŵ� �廪��ѧ������ǿ
�廪��ѧ������ǿ ��Science����һ
��Science����һ ������ߴ��մ�3D
������ߴ��մ�3D �Ͼ���ҵ��ѧ����
�Ͼ���ҵ��ѧ�����ȵ�����
- ��˫���Ӿۺϡ��߾�����������ġ����ǡ�
- ��3D��ӡ����ṹ����ռ�ָ�ϣ���������
- ������������������3D��ӡ����
- ��3D��ӡ���������ƴ��FDM��SLA��CLIP��
- ������ҶƬ��������������������������
- ��������ߴ��մ�3D��ӡ���������մɳ�
- ����ߵ��������3D��ӡ�������߸�����֪
- ���¹����ֹ�����˫����3D��ӡ�������ٶ�
- �����¼�����̼��ά3D��ӡ����һ����
- ��3D��ӡ��SLA������SLS������ȶԱ�


