北航冯林课题组:具有全方位自适应移动性的可变形磁流体微型机器人
时间:2022-02-18 11:38 来源:南极熊 作者:admin 阅读:次
近日,北京航空航天大学机械工程学院仿生与微纳研究所冯林副教授等研发了一种四线圈梯度磁场控制系统,该系统可以实现磁流体微型机器人在三维空间中的运动控制。同时,使用面投影微立体光刻3D打印技术(nanoArch S140,摩方精密),研究团队依据在药物递送的实际应用环境中可能出现的复杂环境进行设计并打印相关模型,并对磁流体微型机器人在药物递送相关领域的性质和优势展开了进一步的研究。相关成果以“Deformable Ferrofluid Microrobot with Omnidirectional Self-adaptive Mobility”为题发表在《Journal of Applied Physics》期刊上。
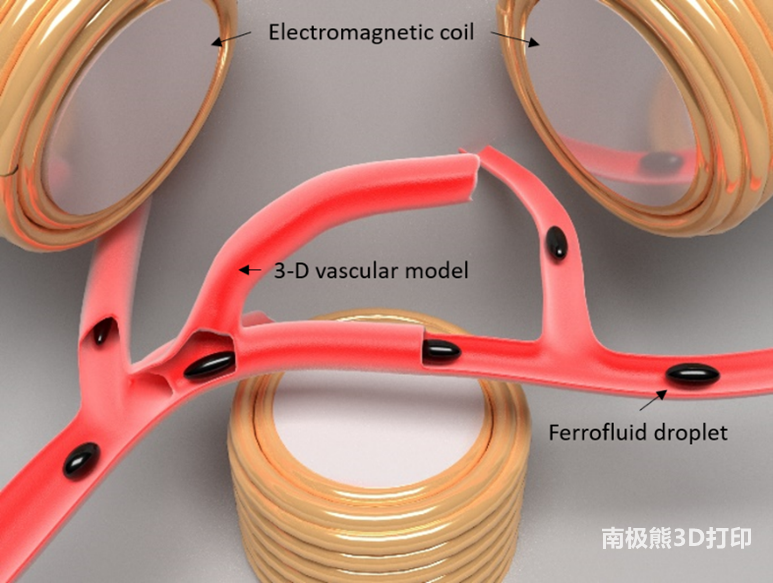
图一 由电磁线圈系统控制在血管模型中移动的铁流体机器人的概念图及系统图。
经过数值模拟和实际测量,该系统产生的磁场梯度可以达到4.14T/m,并可以实现对磁流体机器人的三维控制,最大的控制误差不超过0.3mm。最后,线圈系统控制铁流体液滴在最大内径为3毫米的三维血管模型中实现自主运动。控制效果的实现使得铁流体机器人在通过血管导航进行药物输送方面具有技术潜力。
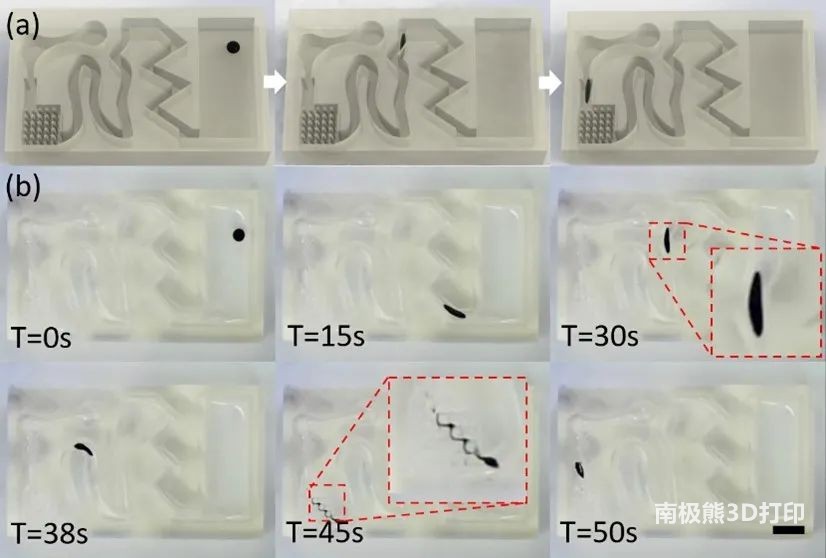
图二 (a) 磁流体机器人运动的示意图。(b)不同时刻的磁流体机器人的位置和状态。比例尺:5毫米。(复杂环境尺寸特征:长38mm宽22mm高5mm,其中折线和曲线通道直径为1.5mm,左下角圆柱阵列援助直径0.5mm,间距0.5mm。)
通过对磁流体机器人的变形能力的研究,发现机器人可以通过比其直径小四倍的缝隙(图二)。同时 ,基于有限元模拟,磁流体机器人的变形可以使流场中的阻力减少43.75%,这使得磁流体机器人在人体血管高流速环境中运动成为可能。此外,利用3D打印的血管模型,对磁控系统控制微型机器人在三维血环境中运动能力进行了验证(图三)。
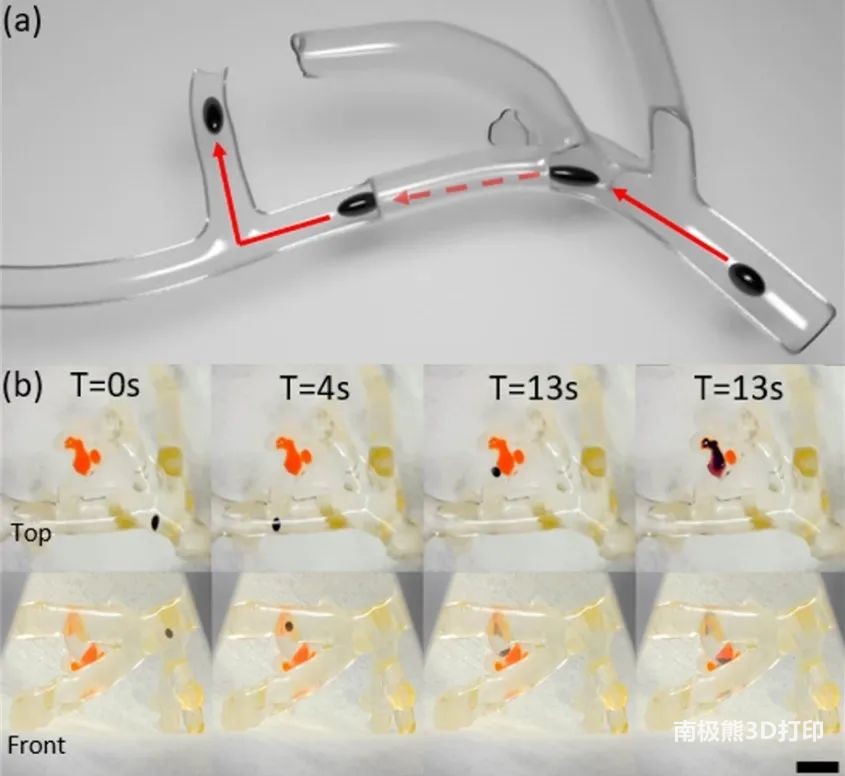
图三 (a) 血管模型中磁流体运动的控制示意图。(b)三维血管模型中不同时刻铁流体机器人的真实位置和状态。比例尺:5毫米。
该项研究成果获得国家重点研发计划(No. 2019YFB1309700)及北京新星科技计划项目(No. Z191100001119003)支持。
原文链接:https://doi.org/10.1063/5.0076653
(责任编辑:admin)

 CONTEXT最新市场报告:入
CONTEXT最新市场报告:入 增材制造研究报告:钛粉市
增材制造研究报告:钛粉市 AM Research报告:2024年
AM Research报告:2024年 生物打印前沿:奥地利初创
生物打印前沿:奥地利初创 瑞典初创企业Nobula接受3D
瑞典初创企业Nobula接受3D 到2033年,陶瓷3D打印市场
到2033年,陶瓷3D打印市场最新内容
 中南大学在增材制
中南大学在增材制 美国应用科学技术
美国应用科学技术 2023年美国3D打印
2023年美国3D打印 浅谈3D打印技术的
浅谈3D打印技术的 据SmarTech评估,
据SmarTech评估, 12位福布斯技术专
12位福布斯技术专热点内容


