西北大学新研究:利用3D打印软体致动器实现类人体肌肉运动
时间:2024-07-19 08:57 来源:南极熊 作者:admin 阅读:次
2024年7月18日,来自美国西北大学的工程师们发明了一种新型柔软、灵活的软体致动器装置,使机器人能够通过扩张和收缩模仿人类肌肉的运动,从而达到移动物体的目的。
在这项研究中,致动器(装置)被用于制造一个圆柱形蠕虫状软机器人和一个人造二头肌。机器人可以在狭小的空间中行走,二头肌可以轻松举起 500 克的重物 5,000 次。每个机器人由标准橡胶制成,成本约为 3 美元,不包括帮助致动器改变形状的小型马达。该团队表示,这种方法比传统的刚性致动器便宜得多,后者可能要花费数百或数千美元。
这项研究由西北大学麦考密克工程学院材料科学与工程和机械工程系的 June andDonald Brewer
Junior 教授 Samuel Truby以及博士后学者、论文第一作者 Taekyoung Kim 领导,机械工程博士候选人 Pranav
Kaarthik 也参与其中。这项研究题为“A Flexible, Architected Soft Robotic Actuator for
MotorizedExtensional Motion/一种用于线性伺服驱动运动的灵活、结构化的软机器人致动器”,发表在《先进智能系统》杂志上。
相关论文链接:https://onlinelibrary.wiley.com/doi/full/10.1002/aisy.202300866
“机器人专家长期以来的目标就是让机器人更安全,”西北大学的 Ryan Truby
说道,他领导了这项研究。“如果软机器人撞到人,伤害不会像被坚硬的机器人撞到那么大。我们的致动器可用于更适合以人为中心的环境的机器人。而且,由于它们价格低廉,我们有可能以历史上成本过高的方式更多地使用它们。”
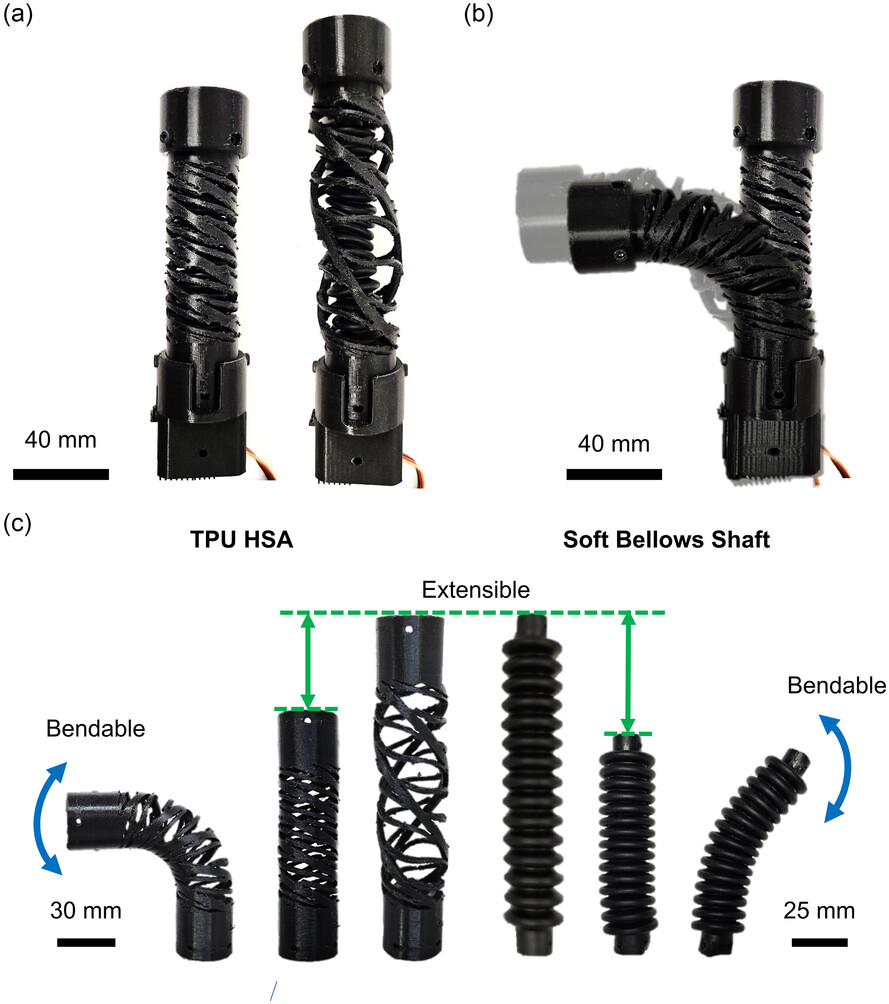
△专为电动拉伸运动而设计的软机器人执行器。灵活的软机器人执行器
a) 通过伺服旋转线性伸展,b) 即使在因外部负载而弯曲时也是如此。c) 执行器由热塑性聚氨酯 (TPU) 手性剪切膨胀 (HSA)
主体和软波纹管轴组成。照片中展示了这两个组件的可延展性和可弯曲性。
仿生软体致动器:增强机器人的机动性和灵活性
刚性致动器传统上一直是机器人设计的主导,但它们的刚性和安全性问题促使研究人员开始探索软致动器。受人类肌肉同时收缩和僵硬的启发,特鲁比和他的团队开发了一种新型致动器。
该团队用橡胶 3D 打印了圆柱形“手性剪切膨胀材料”(HSA),这种材料在扭曲时可以实现独特的运动,如伸展和膨胀。研究人员表示,之前使用昂贵打印机用硬质塑料树脂制成的 HSA 版本缺乏灵活性和可变形性。
Kim 通过使用热塑性聚氨酯(一种用于手机外壳的材料)和经济高效的桌面 3D 打印机解决了这些限制。这使 HSA 变得更软、更灵活,尽管扭转它们进行延伸和扩展仍然是一个挑战。
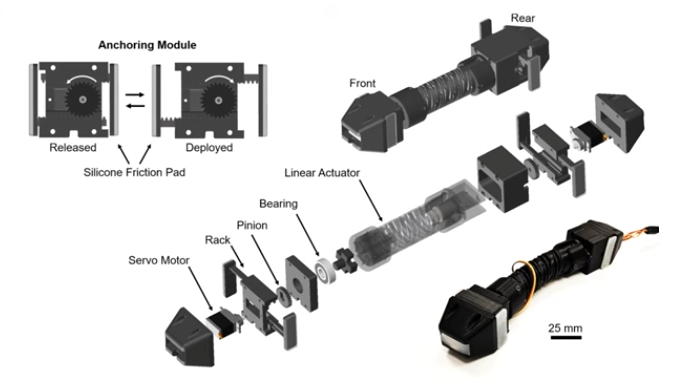
早期的软致动器需要多个伺服电机来扭转,这会使制造过程复杂化,并降低柔软度。Kim 通过添加柔软、可伸缩的橡胶波纹管作为可变形的旋转轴解决了这个问题,使单个伺服电机能够向任一方向伸展或收缩致动器。
添加波纹管后,Kim 可以使用单个致动器制造出爬行软体机器人。与早期的软体机器人不同,这款 26 厘米长的机器人每分钟移动超过 32 厘米,可以在狭窄空间内导航,并且在致动器伸展时变硬。
研究团队表示,软体致动器在操作时能够像人类肌肉一样变硬,这是一项重大进步。与传统机器人相比,这一仿生功能增强了运动能力,扩大了软体机器人可以执行的任务范围。

△西北大学研究人员设计的新型爬行机器人可以在狭窄的管道环境中行走。图片来自西北大学。
3D打印肌肉在运动
3D 打印肌肉代表着一个有前途的研究领域,有可能对肌肉修复和再生方法产生重大影响。一个例子是意大利理工学院(IIT) 的研究人员开发了一种配备 SLA 3D 打印人造肌肉(称为 GRACE 致动器)的机械手,该机械手可复制类似人类的抓握效率。
这些致动器重量仅为 8 克,可以举起重达自身重量 1,000 倍的物体,并允许机械手执行复杂的动作,例如弯曲手指和扭动手腕。由树脂膜打印而成的 GRACE 致动器展示了 3D 打印肌肉的潜力,可以模拟生物功能,并且具有更高的多功能性和强度。
早在 2017 年,哥伦比亚大学的科学家就开发出了一种3D 打印合成肌肉,能够举起高达自身重量 1,000 倍的重量。该团队描述了一种致动器,它使用与乙醇混合的 PMSD 基硅胶弹性体来模拟人体肌肉的扩张和收缩。
当施加电压时,乙醇的相变会导致材料大幅膨胀和收缩。这种“肌肉”兼具高应变和高应力以及低密度,有望为简单的手工任务制造栩栩如生的仿生身体部位。
(责任编辑:admin)

 中南大学:增材制备可生物
中南大学:增材制备可生物 2024年二季度,中国3D打印
2024年二季度,中国3D打印 《Bioactive Materials》
《Bioactive Materials》 增材制造中机器学习研究综
增材制造中机器学习研究综 高性能水凝胶的3D生物打印
高性能水凝胶的3D生物打印 研究人员开创使用X射线和
研究人员开创使用X射线和最新内容
 选区激光熔化增材
选区激光熔化增材 大型聚合物3D打印
大型聚合物3D打印 6K Additive最新
6K Additive最新 如何打造增材制造
如何打造增材制造 从实验室走向生产
从实验室走向生产 3D打印在口腔修复
3D打印在口腔修复热点内容


