3D��ӡ�˹���ë����: �ɶ��ƻ�е���еĶ�ܹ���
ʱ�䣺2023-08-09 10:03 ��Դ��iѧ��i���� ���ߣ�admin �Ķ�����
�ڵ������м�����ë״ͻ���ʵ�ֻ�����Ӧ��ʹ�������ܹ�����Χ����������������Ҫ����ڵ���Ƥ���Ļ�е�����������ܣ���Ҫ���������ؼ����棺i)����ܵĴ��л��ƣ�ii)����չ�ԺͿɶ����ԣ�iii)�������Զȡ�Ȼ�������еĴ��л��������������ض���Ŀ��Ӧ�ã��紥����������Һ���������С����ڽӴ�����Ĵ��з������ж�ܴ��С�������ѹ�ͺ������ṹ���ŵ㡣�����ַ����У������ӵ�Դ�缫����ë�ܵ��̼��������������ӵ�©�缫����ë�Ӵ�ʱ���缫֮��ĵ����ͻᷢ���仯�����ֻ���ʵ���˴����������ֹ���ģʽ����̬ģʽ(�ƶ�����ë�뾲ֹ�Ļ��������)�;�̬ģʽ(�ⲿ����ʹ��ֹ����ë����ƫת)��������ë��Ӵ���������һ�������̼���Խ�ض���ֵʱ���ͻᴥ�������ӳ�ʼ�ġ��ء�״̬���ɵ�������״̬�����ֹ�������Ҫ��ȷ���̼�������ֵ��ʱ�̵�Ӧ������Ϊ��Ч�����ֿ��ش��л��Ƶļ�����ʹ�����÷�Χ������������Һ�������ʹ������еȵ�һӦ�á�����Ӧ�����������ѧ�����˹���ë����ͬʱ�Իҳ��������Ȼ�е�̼�������Ӧ��Ҳ��Ӧ����Һ����ﻷ���еĴ������л���Ҫ��̬������̽���ռ䣬��̬��������֪�����Ĵ̼���
�о��ɹ�
����������������ë��е���������кܸߵ���Ӧ�ٶȣ��ʺϹ㷺�Ĺ�ҵ������������ҽѧӦ�á�����ǰ���������������漰���ӵĴ��л��ƺ����췽�����������ж���ԡ�����չ�ԡ��ɶ����Ժʹ������ԶȵĴ�������������ս��Ϊ�ˣ������������������ѧDaeha Joung���ڵ��˲����˾��иߵ����Ժ���������ĸ��ݺ�Ⱦۼ�����/ʯīϩ��ë�ṹ��Ӧ����Щ��ս�������Щ��ά��ӡ�ṹ�������һ�� ����ë��Ӵ������л��ƣ�ʹ�������Ĺ��������ڿ��أ��Ӷ��������������ȣ������˼���ģ���ԡ���ë�ṹ���кܸߵĿɶ����ԣ�������ȡ��߶ȡ��������У�ͬʱ���ֻ�е����ԡ���������Ƶļ�����ʹ���ܹ���������ˮ����⡢ä�ļ�����Ƭʶ��Ȳ�ͬӦ���н��и������ȼ�⡣��֮��������Ļ��ڵ�����ë�Ķ��ش��л��ƾ��ж������ƣ��ƶ������ܻ����˺������֫�ж��ش��й��ܺ����Ե���Ƥ��Ӧ�õķ�չ������о��ԡ�3D-Printed Artificial Cilia Arrays: A Versatile Tool for Customizable Mechanosensing��Ϊ�ⷢ����Advanced Science�ڿ��ϡ�
ͼ�ĵ���
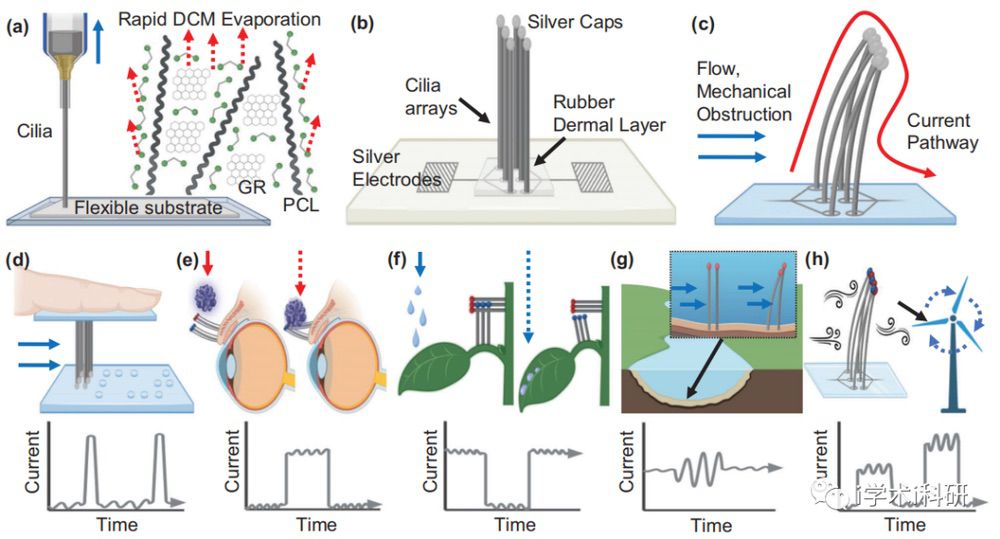
Scheme 1. Schematic of printing scheme and sensing mechanism.
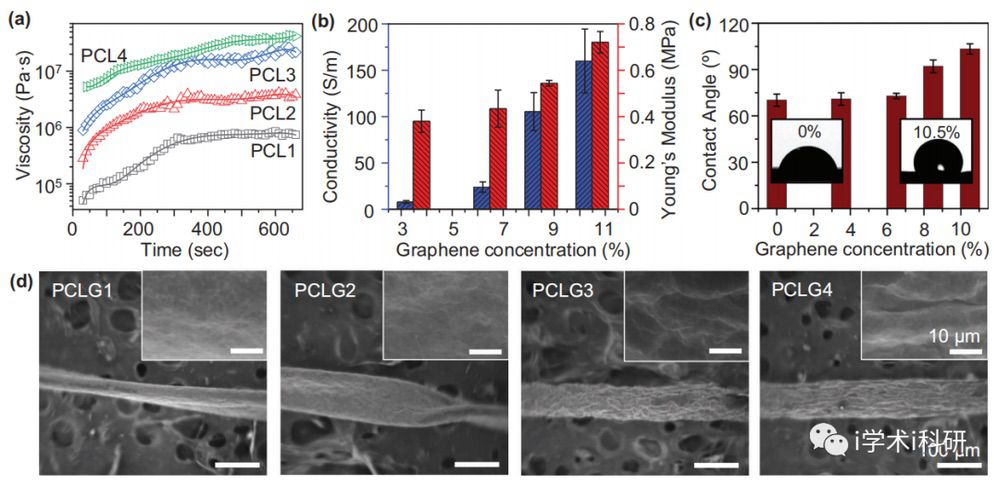
Figure 1. a) Using rheology, the viscosity of
four PCL composites was measured during the curing process. These
composites exhibit a nearly linear increase of viscosity followed by an
asymptotic plateau when the curing process is complete. The curing time
and the corresponding viscosity increase with PCL concentration. b)
Conductivity and Young��s modulus are seen to increase with increasing
graphene concentration, showing the composites become more rigid and
more conductive. c) Contact angle of PCL (0% graphene concentration),
PCLG1 (3.5%), PCLG2 (6.5%), PCLG3 (8.5%), PCLG4(10.5%). The wettability
of the cilia in a sensor can be tuned with graphene concentration for
applications in water or humid environments. d) SEM images of PCLG
composites. The surface roughness increases markedly with increasing
graphene concentration, and the general cylindrical shape is retained
best in concentrations with higher graphene volume fractions.
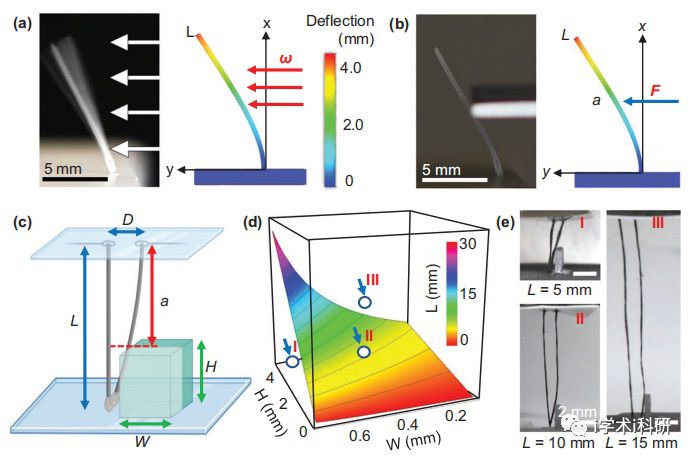
Figure 2. Cilia and sensor characterization.

Figure 3. Euler�CBernoulli beam theory analysis for cilia bending.
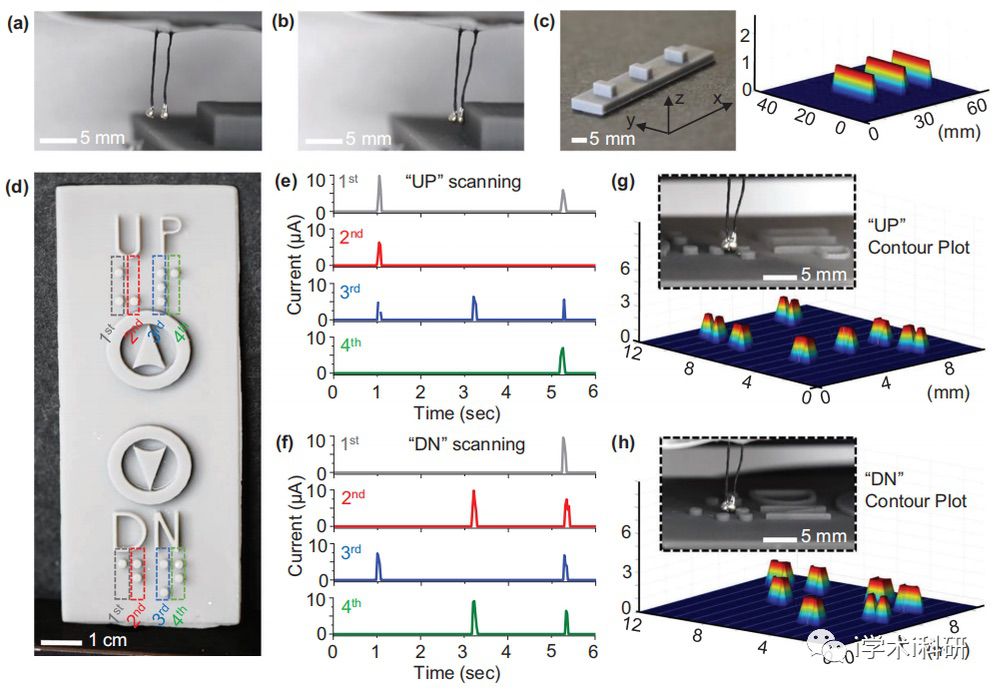
Figure 4. Dynamic sensing applications.
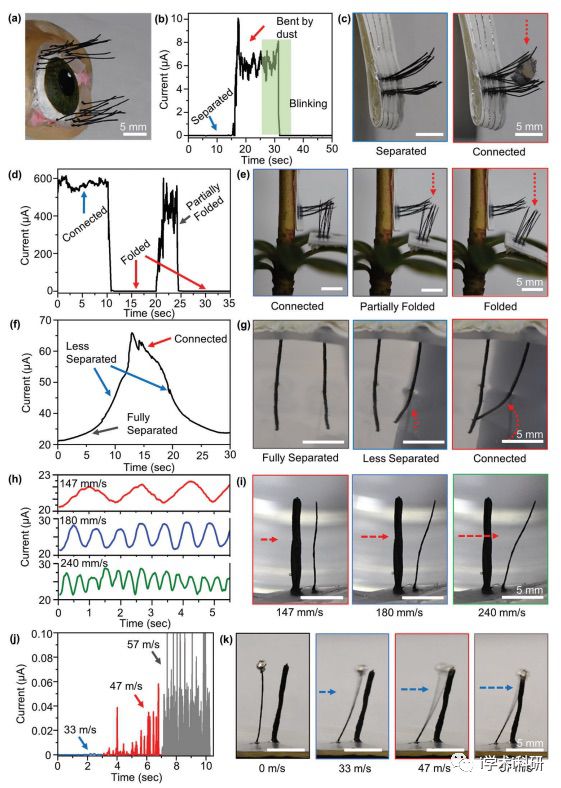
Figure 5. Static sensing applications.
�ܽ���չ��
���߽�����һ�����˹�������ëΪģ�͵���ë��Ӵ���е���л��ơ��û���ʹ��ʯīϩ-PCL ������īˮ��ͨ����ѹ����īˮ3D��ӡ�ɸ��ݺ����ë���У���������Щ���е���Ӧ�������������ִ̼�������Ԫ������ʵ����һ������������ë��ʩ������ѹ�����ⲿ����ʱ�������������ԡ������Բ��Ա�������ë�Ľṹ����Ӧ�Ծ��и߶ȵ�һ���Ժ��;�����ë���ֳ����ѵ����ԣ���ʹ���� 30���Ҳ�ָܻ���δ����ʱ��ԭʼλ�ã��ڿ�����ˮ�ж��ܳ��ܽϸߵ�����(�ֱ�ﵽ 57 ms-1 ��240 mms-1)�����ֳ���ˮ�Ը�ʴ�����������ڶ��ѭ�������±����ȶ������ܡ����ֻ��Ƶ���Ҫ�������������չ�ԡ��ɶ����ԺͶ���ԣ���ʹ���б����������ڴ��Ի�ѹ���ԵĻ�е������ë�����������ֻ����еĿ�����������ë�ɴ�������״̬: �Ӵ��ͷ��롣��ˣ���ë���������Լ�����������״̬���κδ̼��������������˽ṹ�ı仯��������ˮ����������������˶��ȡ���ר�ŵ�ѹ����������������ȣ����ֶ���Ծ��гɱ�Ч��Ϳ���չ�ԡ�
δ����3D��ӡ����������Ϊ����Ŀ���Ʋ���ר�õ���ƣ��Ӷ�ʵ�ָ��Ի�ҽ�ƺͼ�⡣������ë�Ĵ��������Զ�̬��ȷ�ض�ȡä�ģ������������ʿ������˼�����˵�dz������⣬ֲ��ʽ��ë��ë�ܼ�Ⲣ������Ƭ�������Ϊ�ѷ������ṩ��Ч�����ƣ���Ϊ���е������ͷ�ṩ�����˱��������գ����ֻ�����ë�Ĵ��л���Ϊ 3D ��ӡ����һ����е�����ṩ���ڶ���ᣬ�����ڴӻ����о���������ҵ��ҽ�ƿ�����ҵά���ȹ㷺����
��������
3D-Printed Artificial Cilia Arrays: A Versatile Tool for Customizable Mechanosensing
https://doi.org/10.1002/advs.202303164
(���α༭��admin)

��һƪ����������������Ͷ��3D��ӡ��ҵ����
��һƪ�����ʾ���ʯ�Ͳ���������SBOT����Velo3D Sapphire XC������չ3D��ӡ��������
��һƪ�����ʾ���ʯ�Ͳ���������SBOT����Velo3D Sapphire XC������չ3D��ӡ��������
 ����������¾ۺ���FFF
����������¾ۺ���FFF ������Startuplab��������
������Startuplab�������� NAMIC ȫ������������GA
NAMIC ȫ������������GA 3iD��������ȫ��ճ�����
3iD��������ȫ��ճ����� Freeform�˹�����3D��ӡ��
Freeform�˹�����3D��ӡ�� Biomaterials science:ţ
Biomaterials science:ţ��������
- ������������¾ۺ���FFFϵͳ��QUALUP
- ��������Startuplab��������3D��ӡ�ȼ��
- ��NAMIC ȫ������������GAMS���¼��µ�
- ��3iD��������ȫ��ճ�������AMIS Pro��
- ��Freeform�˹�����3D��ӡ�������NVIDIA
- ��Biomaterials science:ţ���ѧ���̿�
- ��������г�����ȫ3D��ӡ�ѺϽ�
- ��UpNano��һ��2PP 3D��ӡ�������700��
- ���µ�������ר��Fronius�ƽ�3D��ӡѹ��
- ��AM Ventures��Headmade��DyeMansion��
 ���ڻ�÷¡�о���
���ڻ�÷¡�о��� Align Technology
Align Technology AM Craft��������
AM Craft�������� Aerojet�������
Aerojet������� ӡ�ȳ�����˾��Gi
ӡ�ȳ�����˾��Gi ����ʹ�ý���3D��
����ʹ�ý���3D���ȵ�����
- ��ī�����ʼ�������ѧ����ģ�����Ӽ�����
- ���о���Ա�����µĻ���ͼ��Ļ���ѧϰ��
- ����һ��ǧ���һ�����Ф��������ͽ���
- ��3D��ӡ��·�� (PCB)������֪�������ﶼ
- ��3D��ӡ�����������켼��������״̬
- �����ɵIJ�ɫ�����ӡ��Ʒ�ڴ��˻����࣬
- ������BIOLIFE4D��˾����3D��ӡ��������
- �����ֳ����ļ����۸���������
- �������ѧ��3D��ӡ�������ĵ�ɱ�뷢�ݲ�
- ��KENNAMETAL�������ڵ綯����������3D��


