一种用于机械手的3D打印可穿戴应变与触觉传感器阵列
时间:2023-03-22 09:53 来源:西安交通大学 作者:admin 阅读:次
研究人员通过DLP打印技术制备出柔性多孔结构基体,并将其置于石墨烯悬浮液中,使得多孔结构表面被石墨烯纳米片层均匀包裹,并形成导电通路,如图1所示。其中二维多孔结构用于制备柔性应变传感器,三维多孔结构用于制备柔性压力传感器。
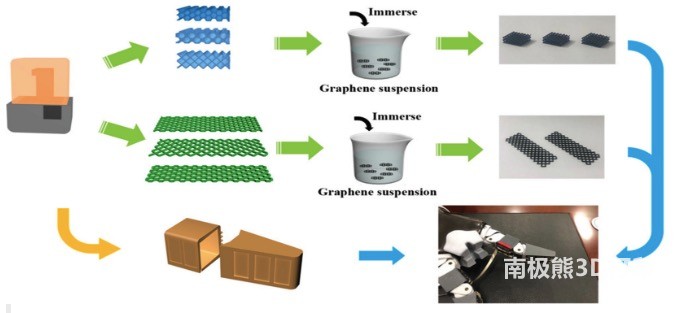
图1 多孔结构应变/压力传感器的制备流程及其阵列布置
该传感器的工作机制是基于电子的隧穿效应。微观层面上,石墨烯片层存在完全接触、可实现电子隧穿的近距离靠近与远距离断路三种状态。由于柔性基体的变形,三种状态的比例发生变化,如图2(c)所示,则表现出宏观上的电阻变化。当多孔结构产生拉伸或压缩变形时,孔的边以及转角的变形均会对石墨烯片层的状态产生影响,但由于单个孔中四个内角的压缩角等于拉伸角,因此内角变化引起的电阻变化相互抵消,整体电阻变化均来源于四边的电阻变化,如图2(d)(e)所示。
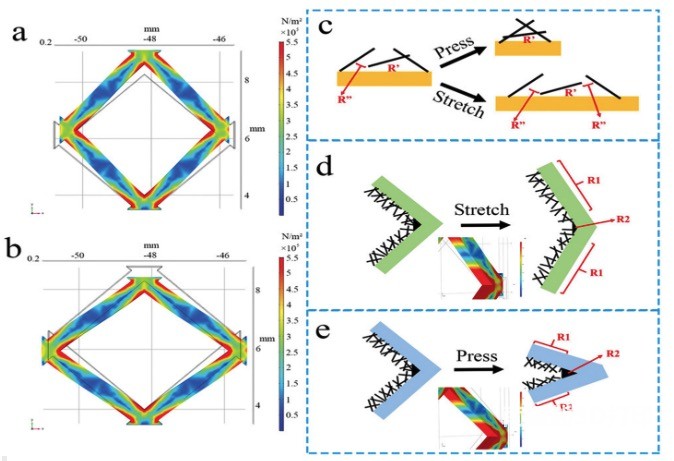
图2 传感原理:(a-b)单胞结构的拉伸/压缩仿真(c)石墨烯状态转变(d-e)拉伸/压缩状态下的阻值变化
研究人员对于不同单胞形状(圆形、六边形、方形)的多孔结构进行了系统的性能对比,最终确定选择检测范围最大的方孔结构作为应变传感器,选择电阻信号连续变化的六边形孔结构作为压力传感器,并分别将其布置于机械手关节处与手指内侧,实现了机械手的抓握感知,如图3所示。在未来的机器人领域,该3D打印柔性传感器阵列设计将具有广阔的应用前景与巨大的开发潜力。
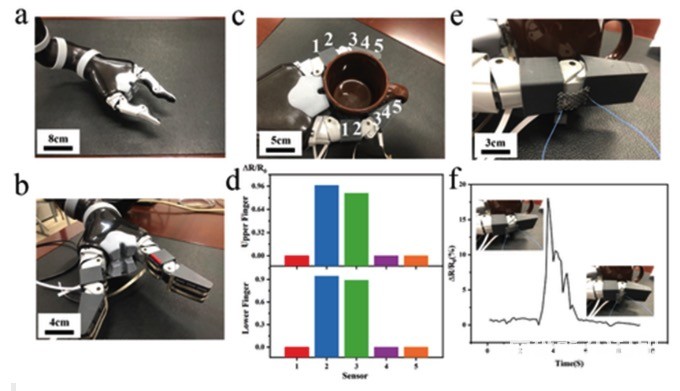
图3 机械手抓握感知:(a)实验所使用机械手 (b-d)压力传感器布置于接触感知 (e-f)应变传感器对手指弯曲程度感知
参考文献:
Pei, Q Zhang, K Yang, et al. A Fully
3D-Printed Wearable Piezoresistive Strain and Tactile Sensing Array for
Robot Hand[J]. Adv. Mater. Technol. 2021, 6, 2100038.
(责任编辑:admin)

 适配多类别高温聚合物FFF
适配多类别高温聚合物FFF 埃肯与Startuplab合作加速
埃肯与Startuplab合作加速 NAMIC 全球增材制造峰会GA
NAMIC 全球增材制造峰会GA 3iD率先引进全新粘结剂喷
3iD率先引进全新粘结剂喷 Freeform人工智能3D打印工
Freeform人工智能3D打印工 Biomaterials science:牛
Biomaterials science:牛最新内容
 卡内基梅隆研究人
卡内基梅隆研究人 Align Technology
Align Technology AM Craft在种子轮
AM Craft在种子轮 Aerojet拿下五角
Aerojet拿下五角 印度初创公司在Gi
印度初创公司在Gi 美军使用金属3D打
美军使用金属3D打热点内容


