3D打印新研究:用于全方位和外感式软执行器的弹性生物凝胶的3D打印
时间:2022-03-01 15:37 来源:南极熊 作者:admin 阅读:次
软体机器人是一种新型柔软机器人,能够适应各种非结构化环境,与人类的交互也更安全。但制作软体机器人的材料往往是不可生物降解的,或者来自不可再生的资源,这在一定程度上破坏了生态环境。此外,传统的制造方法,如模具铸造,不适合复现大自然的复杂性。因此,在开发新的制造工艺的同时,需要考虑可持续发展的概念。
该研究报告了一种基于熔融沉积的3D打印工艺,该工艺能够将完全可生物降解的明胶水凝胶(生物凝胶)墨水打印成尺寸稳定的复杂物体。这一工艺能够快速、经济且高效地制作具有弹性的软机器人的原型,该凝胶可以伸展到原始长度的六倍,并且该技术具有零浪费回收系统。本研究制作了可快速响应(不到一秒)的执行全方位运动的气动致动器,该致动器具有3D打印的可伸缩波导(波导:用来定向引导电磁波的结构),能够进行本体和外部感知。经过动态实时控制,这些软体设备能够自动检测和清除障碍物。它们可以被重复打印,或者经过无害化处理,这对软机器人的可持续发展具有重要意义。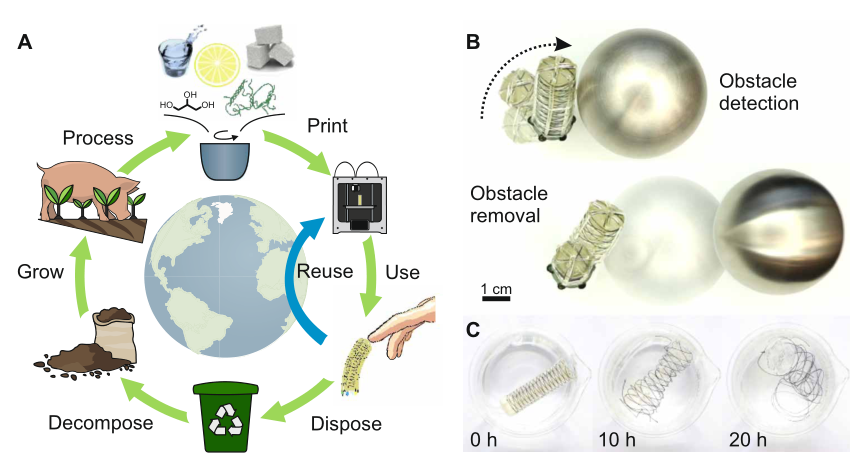
具有波导传感器的3D打印软执行器。(A)生物可降解成分能够实现软机器人“从摇篮到摇篮“(可持续化)的设计(B)带有纤维增强和集成光学传感器的三腔气动执行器。传感器检测致动器路径上的障碍物,并允许移动物体。(C)明胶致动器和波导浸泡在水中时会膨胀和溶解。
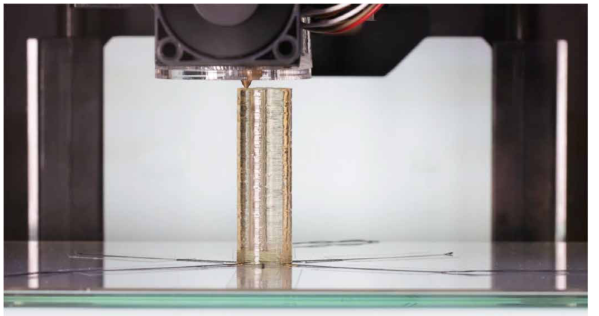
用于软体机器人的生物凝胶的3D打印示意图
生物凝胶的3D打印
在软体机器人中,必须使柔软且高度可伸展的材料。尽管聚二甲基硅氧烷等有机硅弹性体能大量增殖,但它们是不可生物降解的,而且一旦交联,就不能再整形或重复使用。考虑到资源的可持续性和废物的减少,来自生物聚合物(如明胶)、海藻酸盐或纤维素和合成聚酯(如聚癸二酸甘油)的弹性材料已成为许多应用领域的可生物降解、可再生或可回收解决方案的首选材料。
本研究中,研究人员使用了具有弹性但完全可降解的明胶水凝胶,其弹性模量具有可调性(0.3~3 MPa)和高延伸性(>300%)。为了在3D打印过程中挤出这些生物凝胶,研究人员使用了现有的挤出机设备,并对其进行了修改以适应生物凝胶打印的需要。与通常需要加热构建板的传统FDM制造不同,本实验最重要的是通过冷却打印产品来加速凝胶制造过程,以保持挤出生物凝胶的形状稳定。研究人员将空调系统连接到打印腔以进行降温,该系统可以将打印室温度降低到约10°到15°C。打印后,样品立即变软(杨氏模量为0.27
MPa),并可伸展到约507%的极限应变,但随后样品硬化,延展性略有变化。24小时后,最终应变变为470%,这仍然超过墨竹生物凝胶的应变性能(约140%)生物凝胶在环境条件下存放12天后,仍可伸长到430%以上的极限应变,并承受约2.2
MPa的极限应力。比较打印的生物凝胶和模铸的生物凝胶时,研究人员发现3D打印的样品具有更好的性能,达到了更高的延伸性和极限应力。
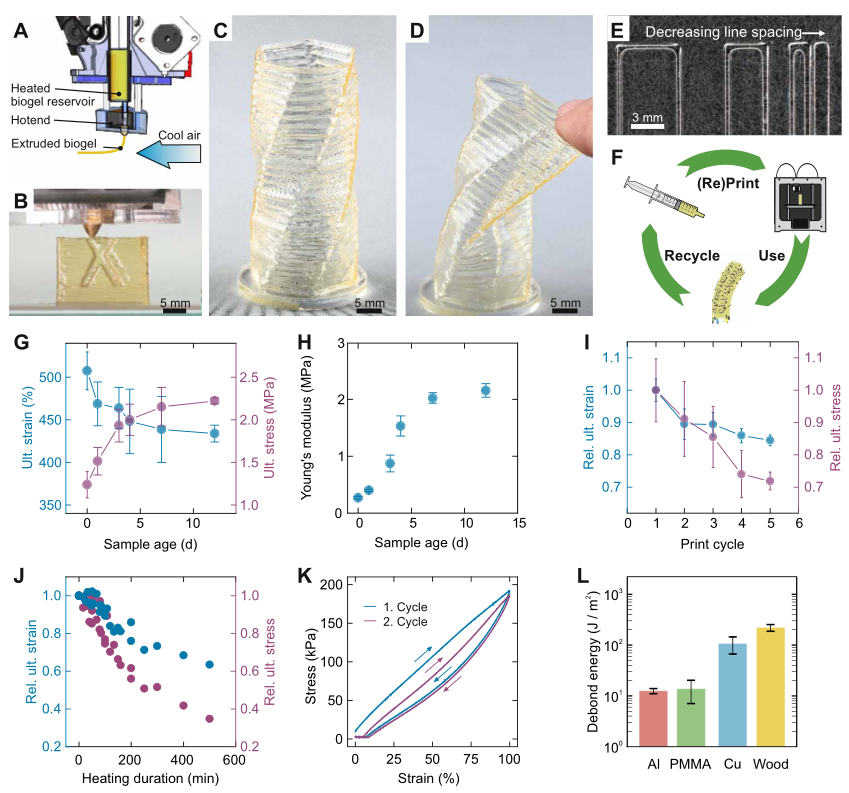
明胶基生物凝胶的3D打印。(A)两阶段加热系统的挤出方案。挤出后,通过冷气流加速凝胶化。(B)
打印固体校准立方体。(C) 打印壁厚为0.8mm的扭曲瓶。(D)软结构和低杨氏模量允许可逆变形。(E)分辨率测试,(F)
打印部件可以通过加热和重复打印材料来回收利用。(G) 由于在环境条件下干燥而改变的机械性能。(H) 样品的杨氏模量随时间的变化(J)
连续加热时明胶降解引起的机械性能的相对变化。(K)
生物凝胶样品在前两个循环中,100%应变下的滞后现象。(L)直接打印在不同基材上的生物凝胶的剥离能。
可伸缩波导传感器的打印
随着人们对设备功能的需求日益增长,软机器人需要具有自身和外部感知问题,以实现受控导航和与环境的交互。可伸展波导可以用来解决上述问题。特别是,有损耗波导(无论是否有包层)在拉伸时对长度变化表现出很高的敏感度。它们可以通过各种材料实现,如有机硅弹性体、紫外光固化树脂或水凝胶。其中,明胶基材具有热塑性,这种特性允许其通过熔融挤压大规模制造波导,或者通过3D打印快速生产波导。本研究中,研究人员直接从生物凝胶墨水中打印没有包层的波导。
3D打印全方位执行器
到目前为止,软体致动器已经应用在手术工具、康复设备、抓爪、行走和游泳机器人等工具或设备中,在本研究中,研究人员使用3D打印技术,打印了一个可生物降解的气动驱动的三腔执行器(直径16.6mm,高60mm。单独充气腔的平行布置允许使用单个压力源和三个电空压力调节器进行全方位驱动。
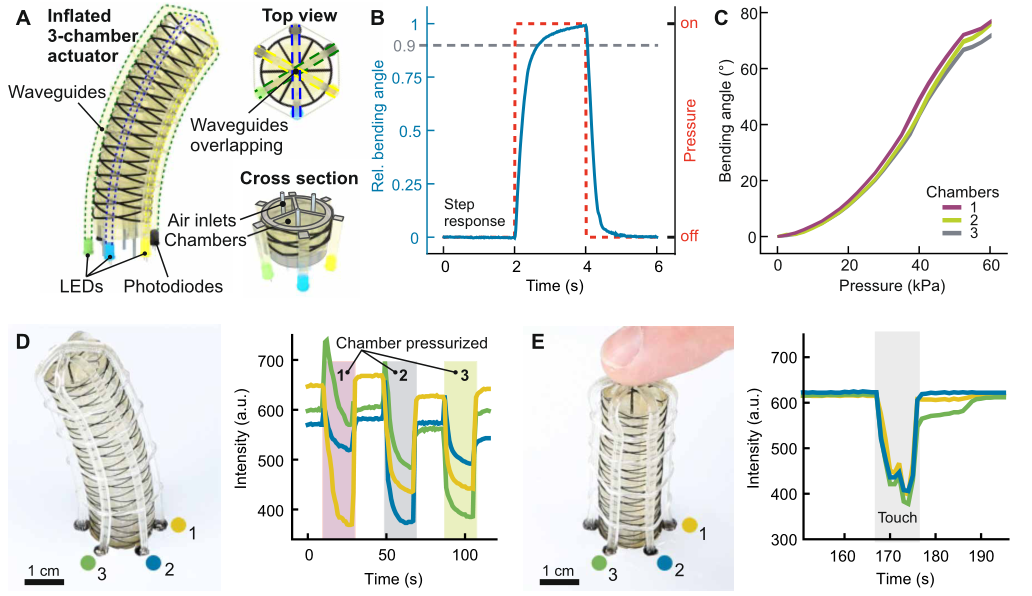
多向自感致动器的性能。(A)波导传感器放置在致动器上,并在顶部相互交叉,以检测弯曲状态和触摸输入。(B)致动器在加压三个腔室之一时的弯曲角的阶跃响应。
(C)所有三个腔室的弯曲角与压力特性的关系。(D)从波导的强度图推断致动器的弯曲方向。当腔体加压时,在最近的波导中强度下降最大。(E)当触摸致动器的尖端(图中的灰色区域)时,所有三个波导上的强度都下降。
小结:
研究人员提出了一种由可持续生物材料制成的3D打印的全方位软驱动器,它具有通过3D打印的软光波导实现多方向传感的功能。多功能和高精度的传感器能够感知关于执行器弯曲状态和其周围物体。这使得软机器人自主地定位其附近的障碍物,并进行移除。研究人员同时也注意到波导的信号输出可能会有所不同。根据操作的不同,仍然需要区分不同的刺激(例如,弯曲和触摸)。
本研究中的机器人的主要结构是完全可生物降解的。此外,由于生物凝胶的水溶性,可以用一种简单的方法将机器人与其不可生物降解的控制部分分开,从而允许凝胶的重复使用。研究人员还发现生物凝胶最多可重复打印五次,可保持初始性能指标的70%以上。通过生物凝胶的再水化来恢复可打印性,并通过提高打印速度来降低打印温度或缩短加热周期,可以实现更多的重复印刷周期。综上,本研究对软机器人的可持续发展具有重要意义。
注:本文内容呈现略有调整,若需可以查看原文。
改编原文:Heiden
A, Preninger D,Lehner L, et al. 3D printing of resilient biogels for
omnidirectional andexteroceptive soft actuators[J]. Science Robotics,
2022, 7(63): eabk2119.
DOI:10.1126/scirobotics.abk2119
(责任编辑:admin)

 适配多类别高温聚合物FFF
适配多类别高温聚合物FFF 埃肯与Startuplab合作加速
埃肯与Startuplab合作加速 NAMIC 全球增材制造峰会GA
NAMIC 全球增材制造峰会GA 3iD率先引进全新粘结剂喷
3iD率先引进全新粘结剂喷 Freeform人工智能3D打印工
Freeform人工智能3D打印工 Biomaterials science:牛
Biomaterials science:牛最新内容
 卡内基梅隆研究人
卡内基梅隆研究人 Align Technology
Align Technology AM Craft在种子轮
AM Craft在种子轮 Aerojet拿下五角
Aerojet拿下五角 印度初创公司在Gi
印度初创公司在Gi 美军使用金属3D打
美军使用金属3D打热点内容


