用于原位生物打印的机器人平台和路径规划算法
时间:2022-01-19 11:29 来源:生物打印与再生工程 作者:admin 阅读:次
背景介绍
目前,基于支架的组织工程在临床应用中受到一些限制。在体内处理和植入三维组织时可能会导致:(1)微观和宏观结构的破坏,(2)由于运输和人工植入而造成的污染风险,(3)对高度无菌环境的要求。此外,由于计算机断层扫描或磁共振成像扫描的分辨率限制,使得设计输入不准确,导致所制造结构的形状可能与实际缺陷不同。
原位生物打印是解决上述问题的一种方案。它可以按照预定义路径将生物材料直接送入损坏部位。目前,原位生物打印方法主要分为手持式和机器人。手持式原位生物打印操作灵活简单,可以轻松制作简单的结构。而机器人原位生物打印可以打印多种生物材料,具有重建复杂组织层次的能力。另一方面,基于机器人的原位打印方法具有3个以上的自由度,与手持式相比涉及的人工干预更少。
该研究旨在研究5自由度机械臂作为原位生物打印平台的潜力和局限性。5自由度的使用确保了更大的工作空间;同时,相对于传统3自由度的3D生物打印机,允许材料沉积在曲面和非光滑表面上,使得缺陷部位的复杂几何形状可以通过精确和连续的生物墨水沉积进行修复
材料与方法
该机器人平台是基于BCN3D的5自由度开源机器人MOVEO开发的(图1A),其机械结构采用3D打印(FDM)制造,电子硬件基于Arduino开发板。
1.硬件
对原版MOVEO硬件的主要修改如下:
(1)原来的末端执行器(夹持器)被注射泵挤压模块所取代(图1B)
(2)一些连接部位被重新设计,以适应光学增量编码器(图1C)
(3)编码器安装在每个轴上,并添加了即插即用连接器,以方便维护(图1D)
(4)为配合使用LinuxCNC开源软件对电子设备进行了升级(图1E)
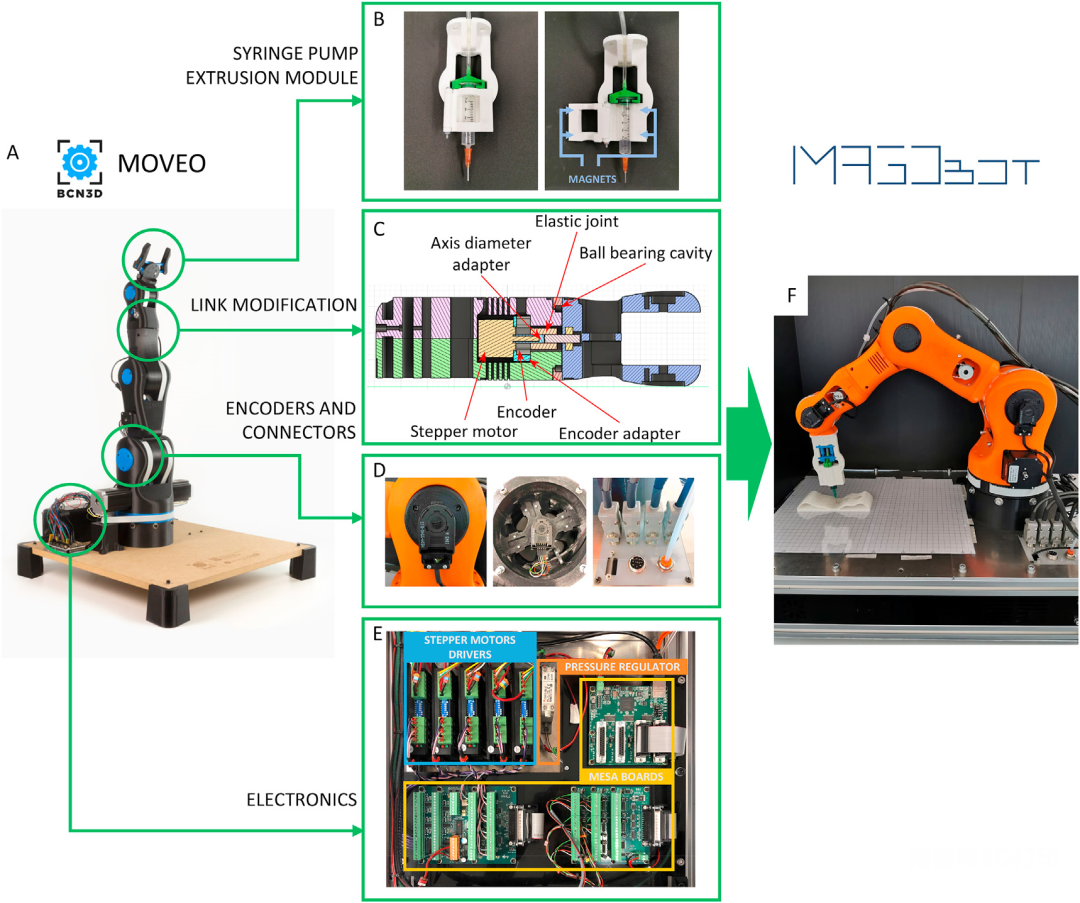
图1 IMAGObot的硬件组成
2.软件在LinuxCNC中,ini文件包含机器人的基础配置,如名称、固件版本、轴的数量和属性等。为适配IMAGOBot机器人,在ini文件中定义5个轴,即每个关节一个。机器人的运动学被设置为trivial,这意味着软件中的每个轴直接对应于物理关节。这使得可以设置g代码中每个轴的角度来控制机器人,有效地使用了LinuxCNC外部的运动学模块。所有轴都定义为旋转运动,单位为度。此外,对每个轴设置了以下主要参数:最大/最小的速度和加速度、行程范围、归航位置和行为(即归航速度和归航顺序),以及电机驱动设置,如表1所示。
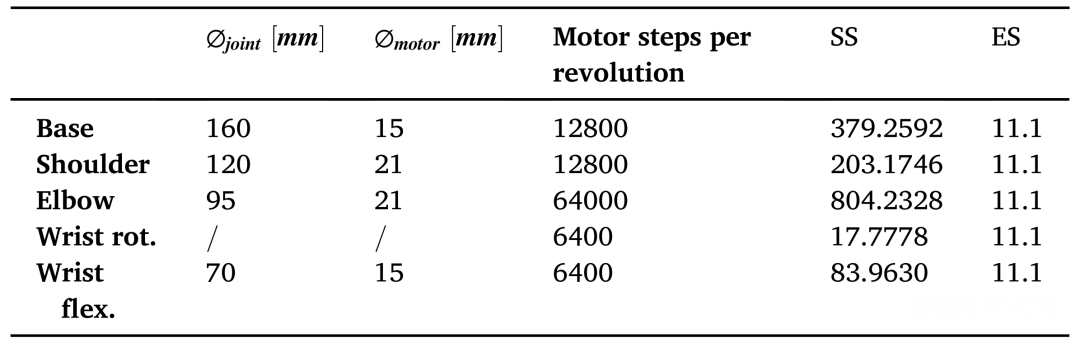
表1 每个轴的Step Scale(SS)和Encoder Scale(ES)值
ini文件还包含了PID控制器设置,具体参数如下:
・ P、I、D值
・ 前馈参数FF0、FF1和FF2
・ 输出偏置量BIAS
・ 死区DEADBAND
・ 最大输出量MAX_OUTPUT
另外,利用HAL逻辑将用于控制压力调节器的Arduino UNO板与LinuxCNC 控制的机械臂集成在一起。
3.路径规划
为了管理生物打印过程的所有阶段,在Matlab中开发了一个路径规划算法,如图2所示。该算法可以表述如下:将通用打印图案投影到表示打印区域的曲面上,为每个交点提取与局部区域相关的坐标和相应的法线向量。对于每个点,通过反向运动学来评估机械臂的关节角度,并将末端执行器限制在法线方向上。
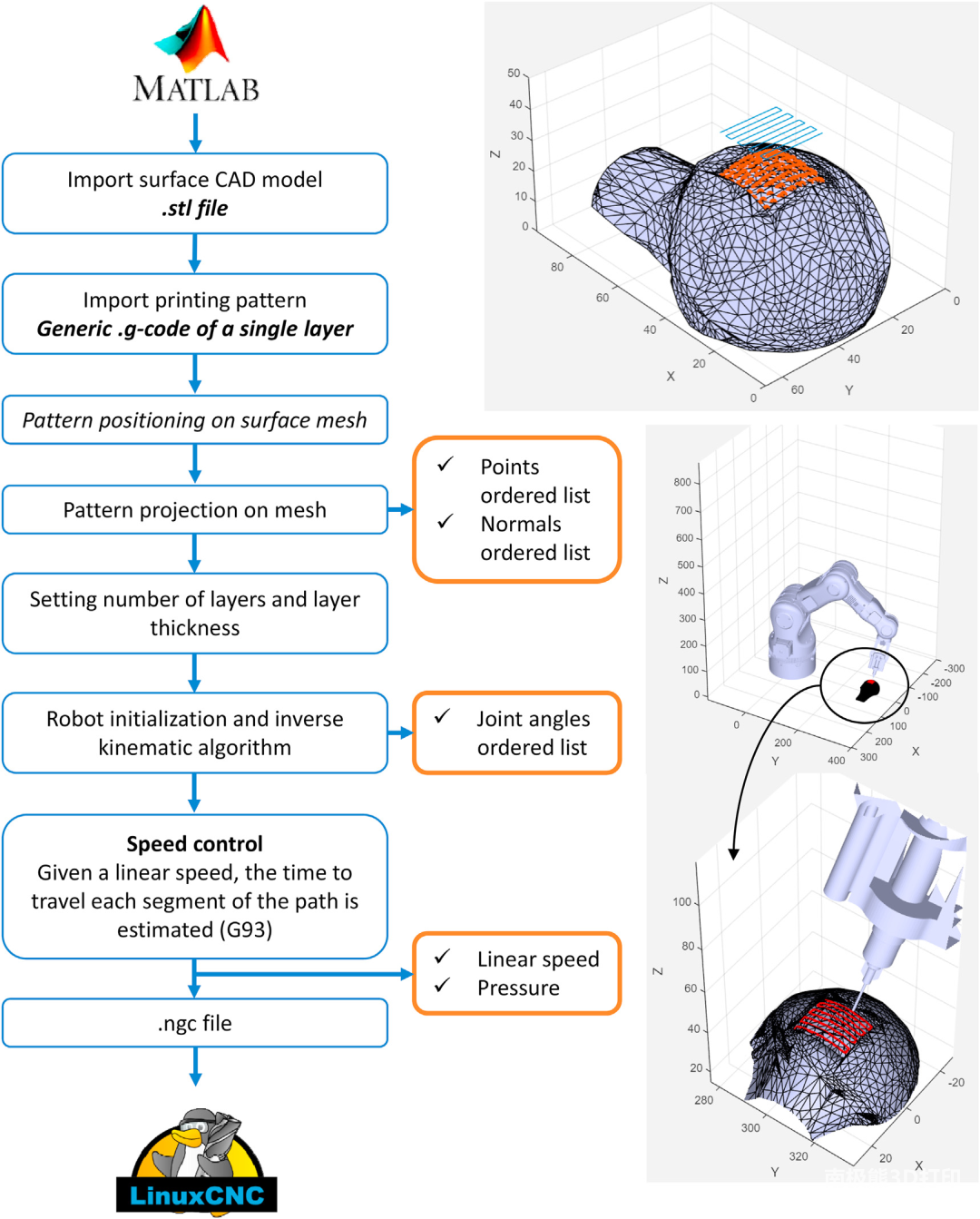
图2 在Matlab中开发的路径规划算法
为了更快、更直观地使用算法,使用 Matlab App Designer开发了图形用户界面 (GUI),可以在其中管理之前描述的所有算法,并能可视化模拟打印过程,如图3所示。
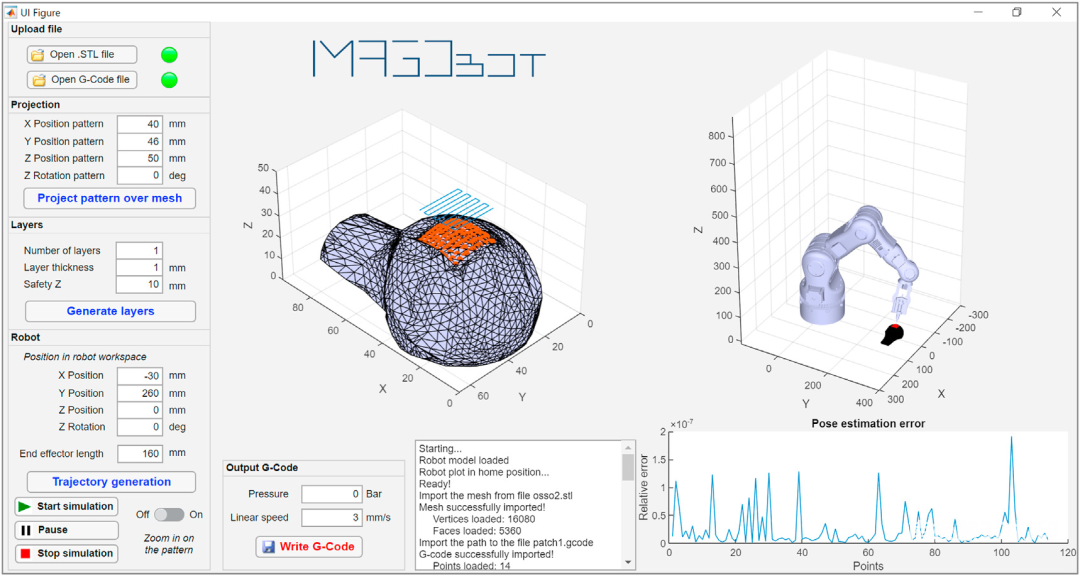
图3 由Matlab App Designer开发的图形用户界面
4.打印性能评价将机械臂末端的挤出泵更换为记号笔,并在打印平台上放置一张方格纸,用于评价系统的可重复性和最高分辨率。
重复性测试:将已知位置的一系列点打印三遍,并测量每次测试与前一次测试的偏差程度。打印路径由9个点组成,这些点以方形图案排列,彼此相距20毫米。机器人在从一个点到另一个点的路径中上升10毫米,在每个点的Z = 0处接触平台。然后进行另一项测试,沿两个主要方向(x和y)打印一系列点(11 个点间隔5毫米),测量偏离理想直线的程度以及这两条线垂直的程度。该测试重复两次。
分辨率测试:以递减的距离(5 mm、2 mm、1 mm、500 μm、200 μm、100 μm)打印平行线,确定可以分辨线条的最小距离。每轮测试都以10、20和30毫米/秒的速度重复,并使用Matlab采集和分析图像。
5.原位生物打印的初步测试
将30% w/v Pluronic Acid(Sigma-Aldrich,Italy)在去离子水中(一种用于挤出式生物打印的水凝胶)挤出到不同的不规则表面上,进行了原位生物打印的初步测试。该测试以10毫米/秒的线速度进行,这是生物打印应用的典型值(范围2-20 毫米/秒)。三种基底被设计具有不同的斜率和曲率,以模拟有缺陷的肱骨头,并在其上进行了原位生物打印试验。
结果
1.重复性测试
用于分析可重复性的打印测试一式三份进行,每次测试后获取图像(图4A为第三次试验的结果)。将参考系的原点固定在图案的中心点,使用Matlab计算9个点的坐标(表2中显示了10mm/s打印速度下的结果)。所有打印速度下的测试都获得了类似的结果。
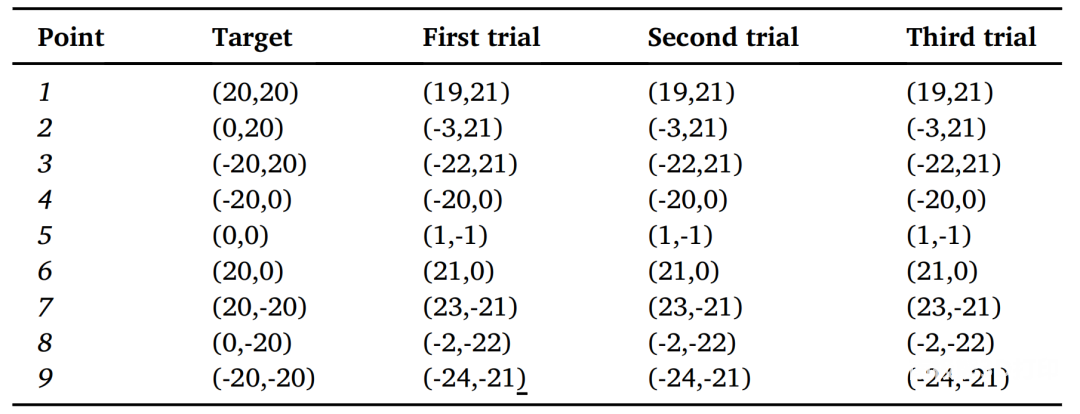
印刷图案上9个点的坐标(毫米)
2.共线性和垂直测试
图4B的红色图例显示了原点和XY坐标轴,作为Matlab分析的参考坐标轴。使用线性回归方法拟合数据点,得到两条直线。对每次测试,还计算了相关系数R2,以评估模型的优劣,如表3所示。最小R2为0.71,因此在最坏情况下,线性模型足以代表数据。

每次试验的R2值
根据这些数据,计算出两条印刷线之间的角度以及印刷线与系统参考线之间的角度,如表4所示。所有测试的打印速度都获得了类似的结果。
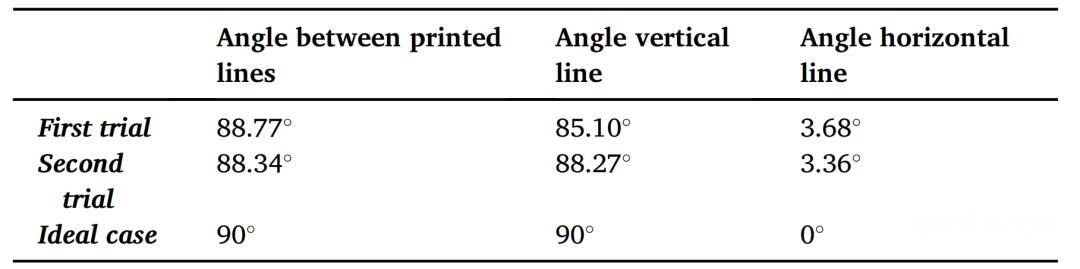
评估印刷线与主方向之间的角度
3.分辨率测试
如图4C所示,线条可以被分辨的最小间距为200um。因此,机器人能够以至少200um的分辨率打印。所有测试的打印速度都得到了类似的结果。
4.原位生物打印的初步测试
第一次打印试验是在一个有三个不同斜坡区的支架上进行的。如图4D所示,挤出轴始终保持垂直于支架表面,表明了算法的可靠性。
另外两个测试在两个不同的表面上进行:第一个具有坡度剧烈变化的区域(图4E),第二个在整个表面上具有渐变且连续的曲率(图4F)。最后,对骨模型进行了原位生物打印试验,如图4G所示。在所有情况下,该算法被证明是鲁棒的,确保了材料的连续挤出。

图4 IMAGObot 的性能评估
总结
本文介绍了机器人原位生物打印机和路径规划算法的设计和开发,以控制生物打印过程的所有阶段。更高的自由度为在不规则表面打印材料提供了可能性。在这种情况下,原位生物打印可能在不久的将来成为现实,特别是对于最容易实现的器官,如皮肤。同时,也要面对安全人机交互的新挑战:外科医生和机器人将在手术室4.0中合作。拥有一台“协作”的生物打印机,能够在手术阶段协助外科医生,进行更精确的介入,并尽量减少人为错误。
参考文献
Gmfa B , Gr A , Afba B , et al. Robotic platform and path planning algorithm for in situ bioprinting[J]. Bioprinting, 2021.
https://doi.org/10.1016/j.bprint.2021.e00139
(责任编辑:admin)

 适配多类别高温聚合物FFF
适配多类别高温聚合物FFF 埃肯与Startuplab合作加速
埃肯与Startuplab合作加速 NAMIC 全球增材制造峰会GA
NAMIC 全球增材制造峰会GA 3iD率先引进全新粘结剂喷
3iD率先引进全新粘结剂喷 Freeform人工智能3D打印工
Freeform人工智能3D打印工 Biomaterials science:牛
Biomaterials science:牛最新内容
 卡内基梅隆研究人
卡内基梅隆研究人 Align Technology
Align Technology AM Craft在种子轮
AM Craft在种子轮 Aerojet拿下五角
Aerojet拿下五角 印度初创公司在Gi
印度初创公司在Gi 美军使用金属3D打
美军使用金属3D打热点内容


