综述:利用人工智能辅助制造技术实现多功能材料的3D打印
时间:2021-11-30 08:25 来源:EngineeringForLife 作者:admin 阅读:次
来自University of Minnesota的Michael C. McAlpine和Hyun Soo Park合作在Nature Reviews Materials杂志上发表了题为“3D-printed multifunctional materials enabled by artificial-intelligence-assisted fabrication technologies”的综述文章。文章介绍了用于原位3D打印的电子材料和生物墨水,具有开环、闭环和预测控制的人工智能3D打印方法,以及手术机器人和人工智能如何与3D打印方法相互集成。最后对人工智能、3D打印、功能材料和个性化生物医学设备的融合进行了展望。
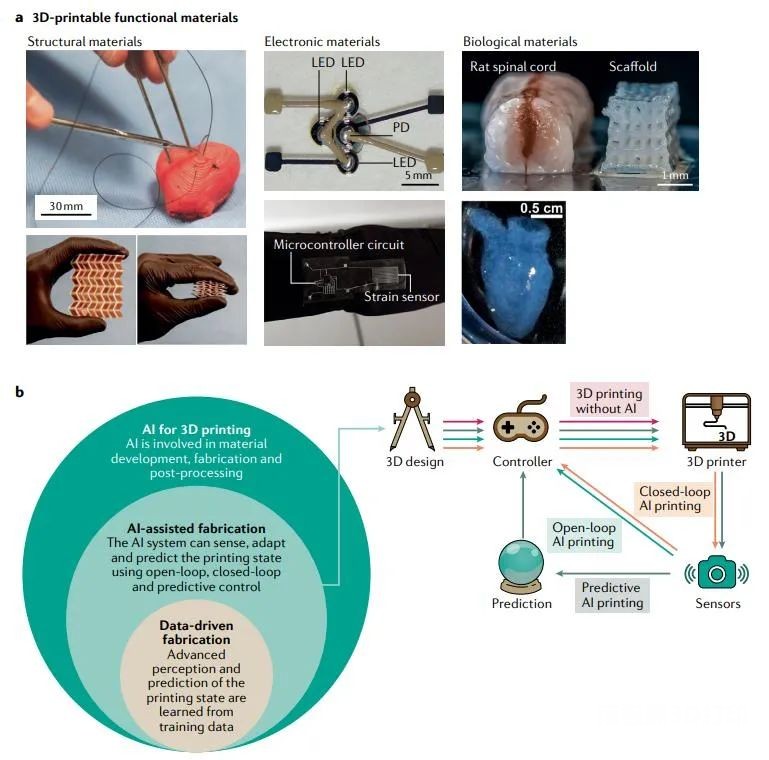
图1 AI辅助制造技术实现多功能材料的3D打印概述
除了没有AI的传统3D打印系统之外,根据AI参与打印程序的三个级别可将打印分为:开环AI、闭环AI和预测性AI三种。
表1 不同程度AI参与的3D打印概述
1. 用于原位3D打印的功能性墨水
3D打印材料需要与相应的3D打印方法兼容,这些方法通常分为基于光固化的或基于挤出式打印的,基于光固化的打印方法通常需要打印材料具有可光固化的能力,而基于挤出式的打印方法需要打印材料具有一定的黏度以及剪切变稀特性,从而便于挤出过程的实现。
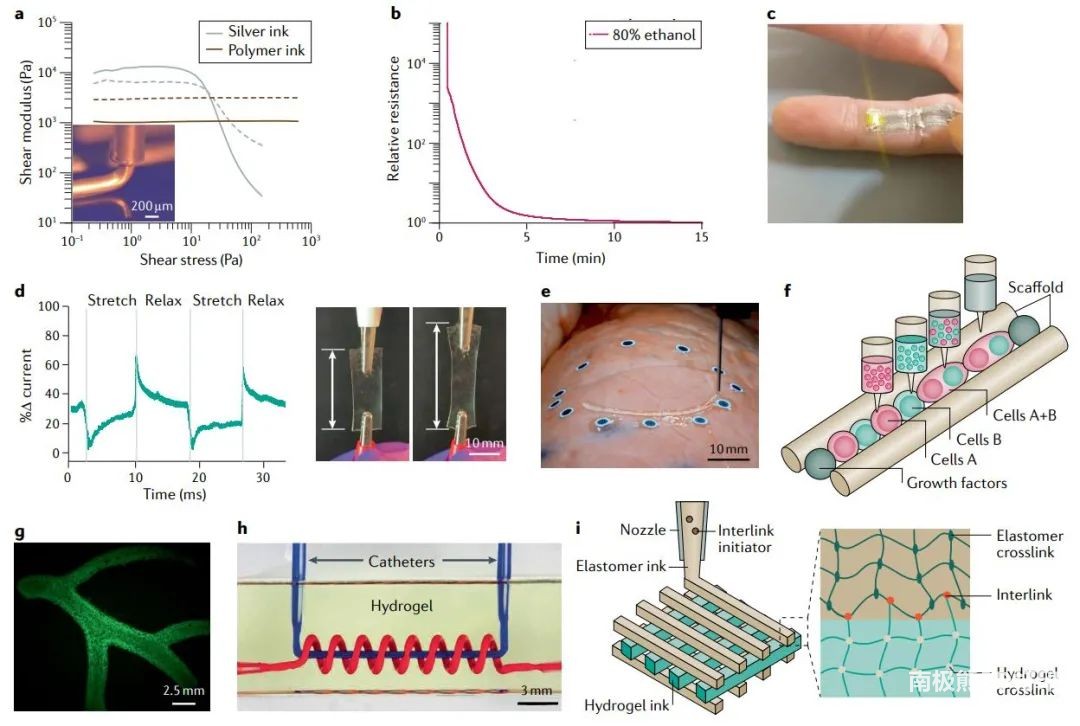
图2 功能性墨水的原位3D打印
1.1 电子材料
用于电子设备原位3D打印的材料需要满足传感、驱动等功能所需的电气特性,且需要具有与目标生物表面相匹配的机械性能、流变特性。使用无机、坚硬的材料时,必须调整它们的尺寸以适应基于挤出的打印,通常是通过将这些材料粉碎成纳米级颗粒来实现的。
1.2 水凝胶
水凝胶可用于组织工程和生物电子应用,其类似于天然细胞外基质,可为细胞提供合适的培养环境。通过改变水凝胶聚合物网络的孔隙率和粘度可对其强度和粘弹性进行调节,通过添加光引发剂及流变改性剂可对其打印性进行优化。水凝胶可以在组织表面进行原位3D打印制造,从而用于医疗密封剂、粘合剂植入物和可穿戴设备等方面。
2. 开环人工智能3D打印
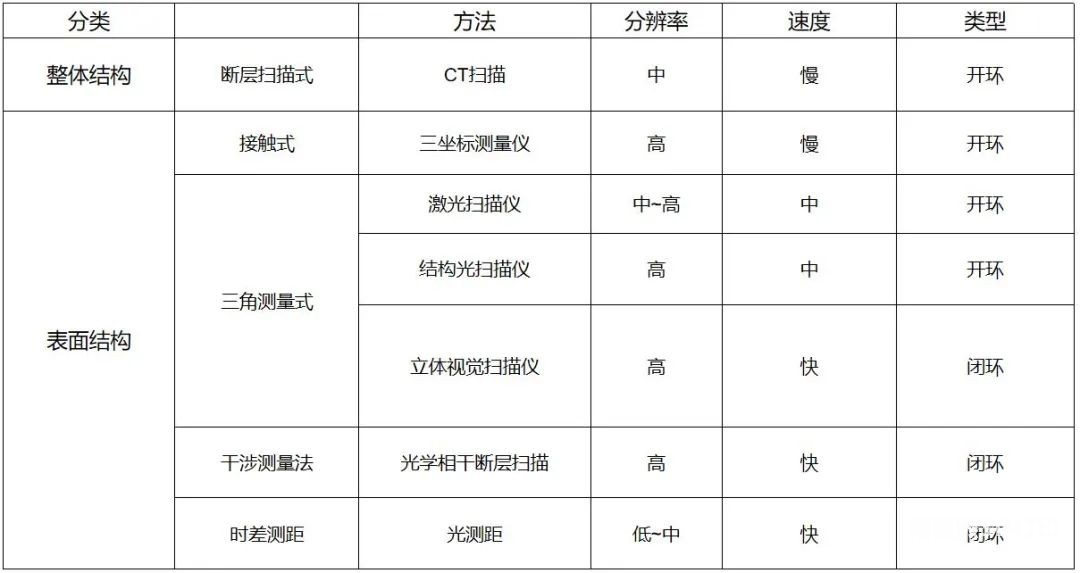
开环人工智能3D打印需要在制造开始之前获取有关打印结构表面几何形状的信息,AI使用此几何信息来确定刀具路径设计和材料分布。针对不同打印结构几何形状捕获的传感方法如下。
表2 3D打印中辅助传感的常见方法
2.1 在非平面表面上进行3D打印
对于开环人工智能3D打印而言,为了在非平面表面上实现直接打印,AI必须在打印之前获取目标的几何信息。对于具有更复杂几何形状的表面,需要借助3D扫描工具并由算法辅助以进行密集的点云数据3D重建。在医学应用中,目标表面的3D信息来源是磁共振成像和CT扫描等医学成像数据。
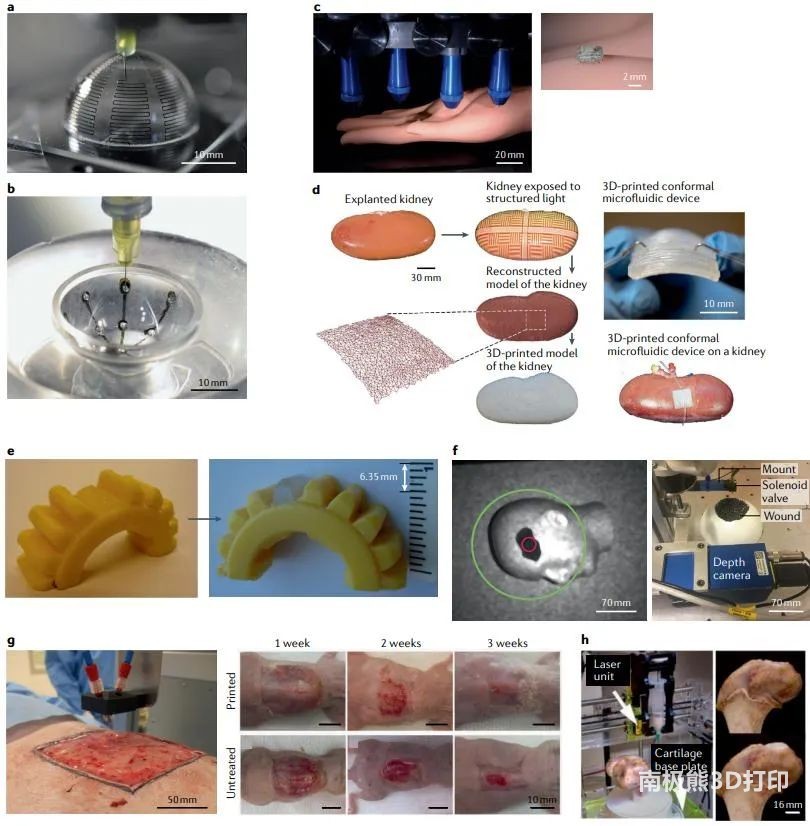
图3 在非平面表面上进行3D打印
2.2 基于目标几何结构的形状编程
通过运用形状编程可使具有特殊功能的材料在特定刺激下(温度、离子浓度、机械负载)实现规定的形状变化。基于目标几何结构的形状编程常用于可穿戴医疗植入物的制造,其可以直接3D打印在人体上,以进行临床诊断或进行伤口修复。
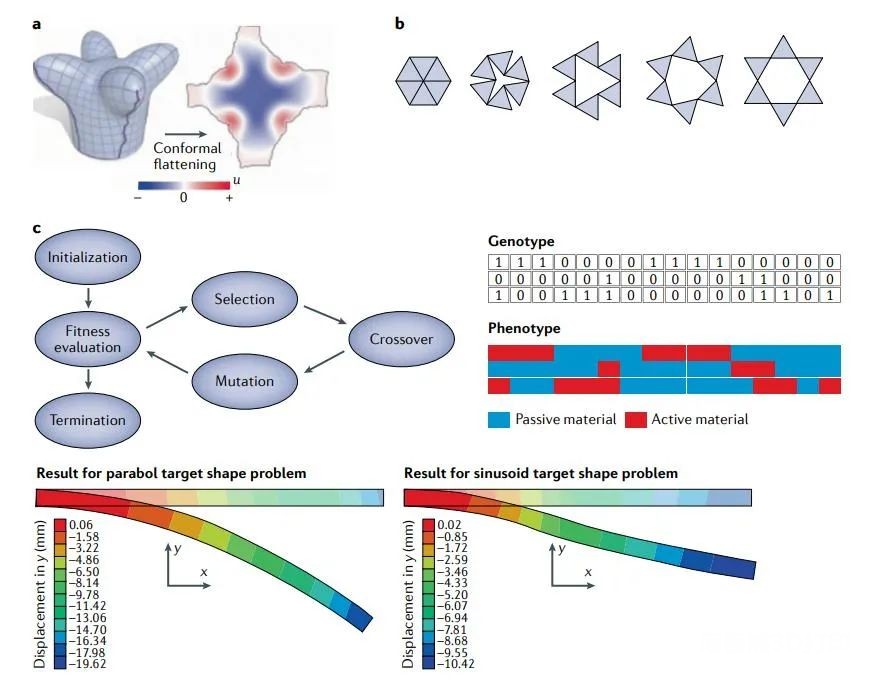
图4 基于的打印结构几何结构的形状编程
3. 闭环人工智能3D打印
闭环AI打印是指实时适应打印环境变化的3D打印方法,其基于检测、跟踪和识别算法,可以在打印过程中实时更新运动状态、打印层的表面结构和打印头的挤出状态。闭环人工智能3D打印主要可实现两大功能:通过在线校正提高打印质量、通过在线跟踪实现移动目标上的原位打印。
3.1 提高打印质量
在闭环3D打印中,各种传感器通过与3D打印平台进行集成,能够观察材料和打印结构的状态。传感数据被反馈到计算机视觉和机器学习算法等计算工具中,进而识别打印缺陷,并向材料进给和运动控制系统提供反馈,以纠正打印中出现的错误。
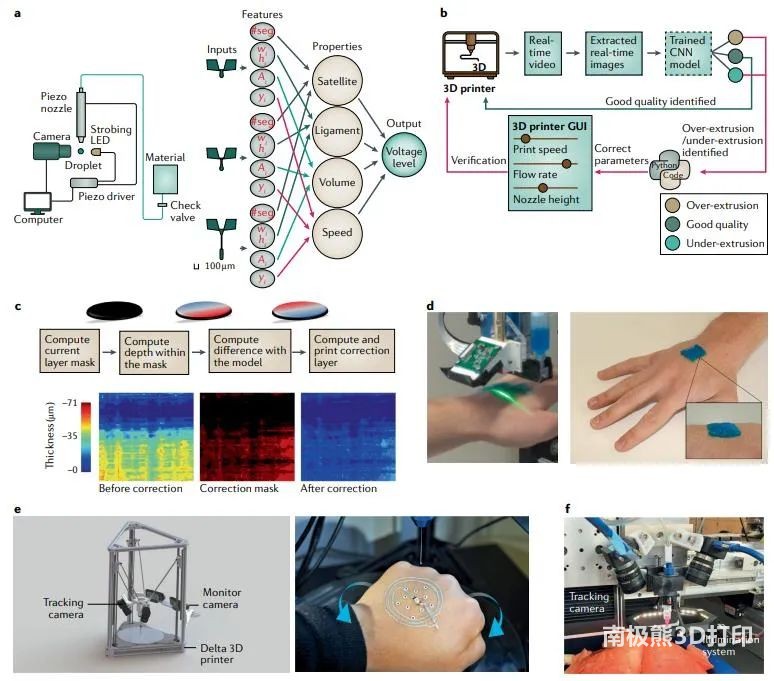
图5 利用闭环AI校正实现打印质量提升及位于移动目标上的3D打印
3.2 在移动目标上进行3D打印
活体中的皮肤和软器官都会随时间的变化而发生刚性变换和非刚性变形(呼吸、心跳),要实现在这些动态变化结构上的原位打印,需要实时更新传感数据来调整打印路径。
3.3 机器人感知技术辅助原位3D打印
利用机器人感知技术目的是为了识别器官组织的几何和机械特性,以及动态系统中的干扰和不确定性。低级感知类似于人类的视觉感知,它利用成像系统和图像处理算法来检测视觉特征,以进行3D重建。高级感知类似于大脑和神经系统的知觉,在3D打印中理解低级感知重构的3D场景,并用于后续刀具路径规划。
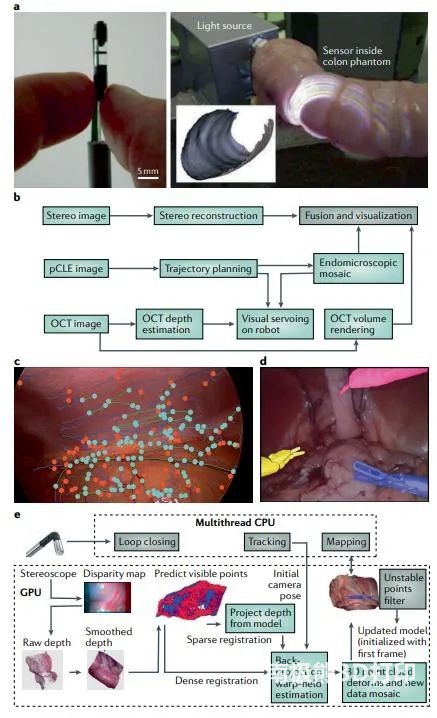
图6 用于原位3D打印的机器人感知技术
4. 预测性人工智能辅助3D打印
在活体器官上进行3D打印的能力主要受到传感、控制和计算延迟的限制。打印过程需要对组织表面的变形做出响应,否则可能会导致器械碰撞或穿透组织,从而影响打印质量、损伤组织。这需要预测性人工智能在了解当前状态的同时,还可以根据过去的经验预测未来状态,预测周围组织的未来变形并规划未来的命令,以有效减少或消除打印错误。
5. 手术机器人实现原位3D打印
在医学领域,手术机器人原位3D打印可将具有理想电、化学和生物功能的生物材料直接输送到人体之中,从而以多种方式辅助现代医学治疗。这些具有先进传感和精确运动控制能力的手术机器人可以实现“更智能”的手术,以减少因医疗错误造成的死亡或伤害。
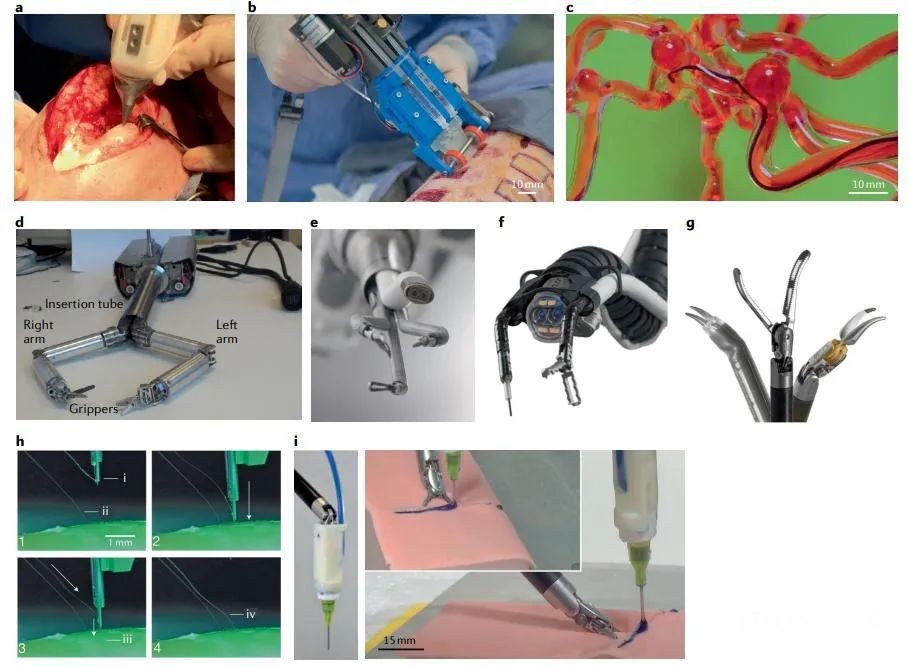
图7 使用手术机器人进行3D打印
利用人工智能辅助制造技术进行的3D打印在可穿戴设备和植入物的制造方面具有巨大的潜力,但将AI技术集成于3D打印之上仍处于起步阶段,目前仍然缺乏3D打印机器人和用户之间的智能交互界面。展望未来,增强现实和虚拟现实等技术和3D打印的结合将会使人工智能实现全程的打印指导,利用人工智能进行辅助制造也将成为迈向3D打印普及化的重要途径。
(责任编辑:admin)

 适配多类别高温聚合物FFF
适配多类别高温聚合物FFF 埃肯与Startuplab合作加速
埃肯与Startuplab合作加速 NAMIC 全球增材制造峰会GA
NAMIC 全球增材制造峰会GA 3iD率先引进全新粘结剂喷
3iD率先引进全新粘结剂喷 Freeform人工智能3D打印工
Freeform人工智能3D打印工 Biomaterials science:牛
Biomaterials science:牛最新内容
 卡内基梅隆研究人
卡内基梅隆研究人 Align Technology
Align Technology AM Craft在种子轮
AM Craft在种子轮 Aerojet拿下五角
Aerojet拿下五角 印度初创公司在Gi
印度初创公司在Gi 美军使用金属3D打
美军使用金属3D打热点内容


