韩国开发开源3D打印拟人化机器人手系统HRI
时间:2020-03-13 09:07 来源:中国3D打印网 作者:中国3D打印网 阅读:次
HRI手动系统是开源的且价格合理,允许用户以500美元左右的价格进行3D打印。该系统采用五指结构开发,作者在创建手时就牢记了协作机器人技术。这个想法在制造业中不断发展,允许机器人与人类工业工人合作完成任务。端部执行器的使用也越来越广泛,除了用于简单的零件拾取和放置操作之外,还用于抓取和组装。
![指状末端执行器的两种类型:(a)抓爪类型[9],[21],(b)拟人类型](https://www.3ddayin.net/uploads/allimg/200313/1-200313091242T9.jpg "指状末端执行器的两种类型:(a)抓爪类型[9],[21],(b)拟人类型")
指状末端执行器的两种类型:(a)抓爪类型[9],[21],(b)拟人类型
典型的机械手有抓取器(最常见)类型和拟人化多指类型。虽然机械手通常由工业用户使用,但它只能执行最基本的任务,并且无法为操作机器或任何需要精确度的工作提供支持。另一方面,“拟人”类型模仿人的手,既具有形式又具有功能,具有五个手指,并且能够执行“比简单的抓手类型更广泛的应用”。
但是,随着功能的更加复杂,必须编写更复杂的零件和软件,例如执行器,各种机构和控制算法。
3D建模,(b)建议的机器人手,以及(c)带有UR3机械手的HRI手")
HRI手:(a)3D建模,(b)建议的机器人手,以及(c)带有UR3机械手的HRI手
按照典型的男性手设计的拟人化手有四个手指,其中包括:
指间远端(DIP)
指间近端(PIP)
掌指关节
拇指包括:
指间(IP)
掌指(MCP)
腕骨(CMC)关节
拇指部分“……”通过两个电动机来操作MCP和CMC接头。基于微控制器单元(MCU)通过蓝牙通信接收到的控制信号来控制电动机。还提供了URDF,python节点和rviz软件包来支持机器人操作系统(ROS)。所有的硬件CAD设计文件和软件源代码均已发布,可以轻松组装和修改。”作者解释说。
指状模块包括四个链接和三个关节(MCP,PIP和DIP关节)。

HRI手的规格

HRI手动系统的体系结构。用于控制HRI手的数据协议。

手指模块的设计。
该项目还包括有关硬件文件,软件文件,组件,电子设备配置,操作过程,机器人操作系统过程等的所有详细信息。
手指的前部,(b)手指的后部,(c)拇指部分,(d)掌和掌套,(e)腕部,(f)HRI的后部手盖和ISO 9409-1-50-4-M6部分")
HRI手的组装程序:(a)手指的前部,(b)手指的后部,(c)拇指部分,(d)掌和掌套,(e)腕部,(f)HRI的后部手盖和ISO 9409-1-50-4-M6部分

机器人手握分类法
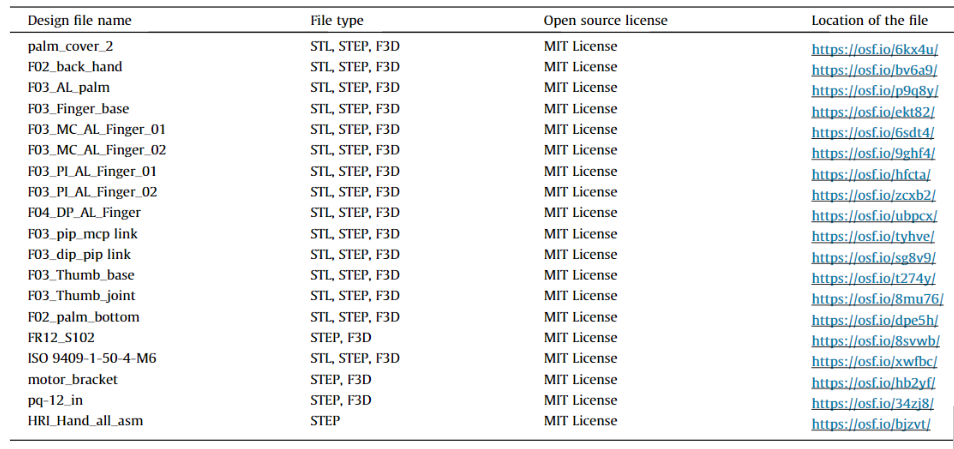
HRI手的设计文件摘要
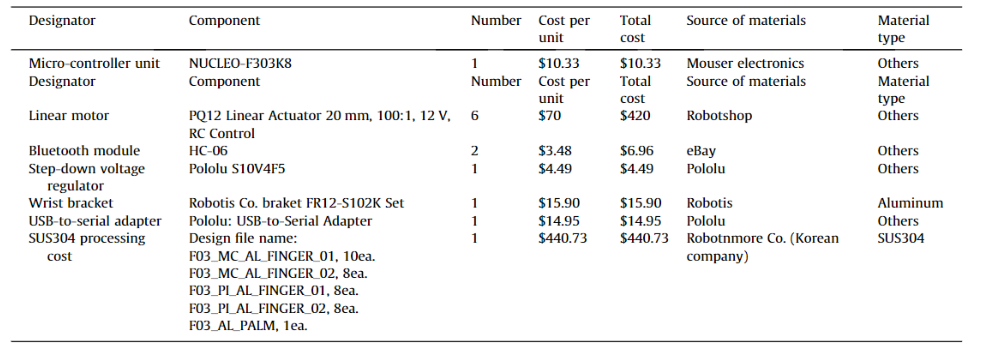
HRI手动系统的物料清单
中国3D打印网原创文章!
(责任编辑:admin)

 适配多类别高温聚合物FFF
适配多类别高温聚合物FFF 埃肯与Startuplab合作加速
埃肯与Startuplab合作加速 NAMIC 全球增材制造峰会GA
NAMIC 全球增材制造峰会GA 3iD率先引进全新粘结剂喷
3iD率先引进全新粘结剂喷 Freeform人工智能3D打印工
Freeform人工智能3D打印工 Biomaterials science:牛
Biomaterials science:牛最新内容
 卡内基梅隆研究人
卡内基梅隆研究人 Align Technology
Align Technology AM Craft在种子轮
AM Craft在种子轮 Aerojet拿下五角
Aerojet拿下五角 印度初创公司在Gi
印度初创公司在Gi 美军使用金属3D打
美军使用金属3D打热点内容


