TU DELFT工程师开发具有自我感知的3D打印软机器人
时间:2019-08-04 18:54 来源:中国3D打印网 作者:中国3D打印网 阅读:次
3D打印软机器人
柔软的机器人由高度灵活的材料制成,能够进行类似于生物的自然运动。目前,NASA正在使用3D打印硅胶模具的致动器来构建专为太空探索而设计的软机器人。其他应用也在医学和动物学方面进行了研究。TU Delft研究人员实施了Stratasys PolyJet 3D打印和Agilus Black,VeroCyan和VeroMagenta材料,以创建弯曲执行器,在顶部保持具有可扩展波纹管形状的空气。根据Scharff的说法,“给气室充气会使顶部的波纹管膨胀,而底部保持相同的长度,产生弯曲运动。”
为了增加“感应”能力,Scharff补充道,“我们在这些顶部波纹管内打印彩色图案,并在执行器的不可伸展的底部用颜色传感器观察这些颜色模式,当执行器充气时,从传感器开始出现的颜色会逐渐消失。我们使用这种颜色的变化和强度的变化来预测执行者的形状。“
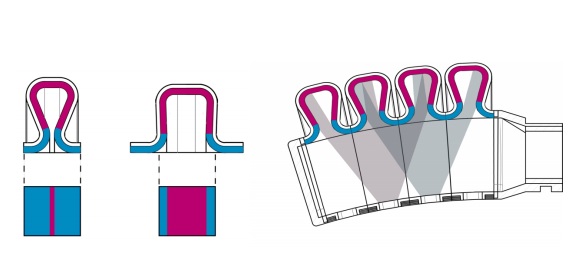
致动器和颜色传感器。图片来自TU Delft。
坚固的抓手
传感器使用前馈神经网络(FNN)进行操作。在FNN内收集的1000个传感器值样本与致动器形状相对应。致动器形状由不可伸展层上的六个标记表示,这些标记由相机跟踪。网络的输入是4个颜色传感器的读数,有4个通道(红色,绿色,蓝色,白色)。“我们的方法能够预测每个标记的位置,误差通常在0.025和0.075mm之间。“Scharff补充道。“与软机器人中的现有传感器不同,我们能够测量夹具在物体周围弯曲的确切形状。因此,这项工作是朝着能够用软机器人准确移动和抓取物体迈出的一大步。“

3D打印的执行器和颜色传感器。图片来自TU Delft。
中国3D打印网原创文章,转载请给回链!
(责任编辑:admin)

 适配多类别高温聚合物FFF
适配多类别高温聚合物FFF 埃肯与Startuplab合作加速
埃肯与Startuplab合作加速 NAMIC 全球增材制造峰会GA
NAMIC 全球增材制造峰会GA 3iD率先引进全新粘结剂喷
3iD率先引进全新粘结剂喷 Freeform人工智能3D打印工
Freeform人工智能3D打印工 Biomaterials science:牛
Biomaterials science:牛最新内容
 卡内基梅隆研究人
卡内基梅隆研究人 Align Technology
Align Technology AM Craft在种子轮
AM Craft在种子轮 Aerojet拿下五角
Aerojet拿下五角 印度初创公司在Gi
印度初创公司在Gi 美军使用金属3D打
美军使用金属3D打热点内容


