宁夏大学&浙江大学:3D打印类昆虫微型快速爬行机器人
时间:2023-02-13 14:59 来源:EngineeringForLife 作者:admin 阅读:次
近期,宁夏大学冒杰与浙江大学罗英武及贺永团队合作开发了一种3D打印的可高频响应人造肌肉,并利用该人造肌肉,设计和制造了一种昆虫大小的软体机器人。整个机器人仅15mm,比硬币小,重量仅450毫克,能够超快移动(4个体长每秒,已报道介电弹性体驱动机器人中爬行最快)。该机器人可以在各种场地和复杂的路径上奔跑,在小管道内攀爬,可以实现机器人群体同时工作,并可以承受和感知反复的冲击,展示出较高的鲁棒性、良好的环境适应性和冲击感知能力。相关研究结果以“3D-Printed High-Frequency Dielectric Elastomer Actuator toward Insect-Scale Ultrafast Soft Robot”为题,发表于《ACS Materials Letters》杂志上,第一作者为朱元波硕士,共同通讯作者为宁夏大学化工学院的冒杰副教授、浙江大学化工学院的罗英武教授及机械学院的贺永教授。

图1 3D打印微型快速爬行机器人
1. 快速运动的秘密――高频响应介电弹性体驱动器
该机器人可以快速运动的秘密来源于其独特的运动肌肉――介电弹性体驱动器。介电弹性体驱动器是一类电活性人工肌肉,可在电场下发生快速变形。然而,自动化、连续化、快速化、定制化构建微型介电弹性体驱动器一直是制约介电弹性体领域发展的难题。为解决这一难题,团队研发了多材料墨水直写同轴3D打印工艺进行线圈型介电弹性体驱动器的高效地制造。所制备的驱动器能在750hz的高频下快速可逆变形,并具备超长的使用寿命(驱动超过100万次循环而不出现性能下降)。这一优异性能的驱动器的制造为机器人的快速运动奠定了坚实的基础。
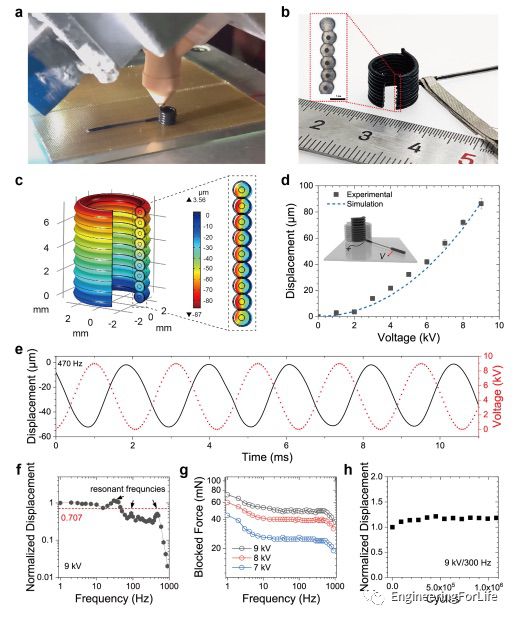
图2 线圈状介电弹性体驱动器性能
2. 类昆虫软体机器人性能
该机器人体型大小与昆虫相似,可实现>50mm/s(4倍身长/秒)的运动速度,是目前已知的介电弹性体驱动的爬行机器人中体型最小,速度最快的机器人之一。
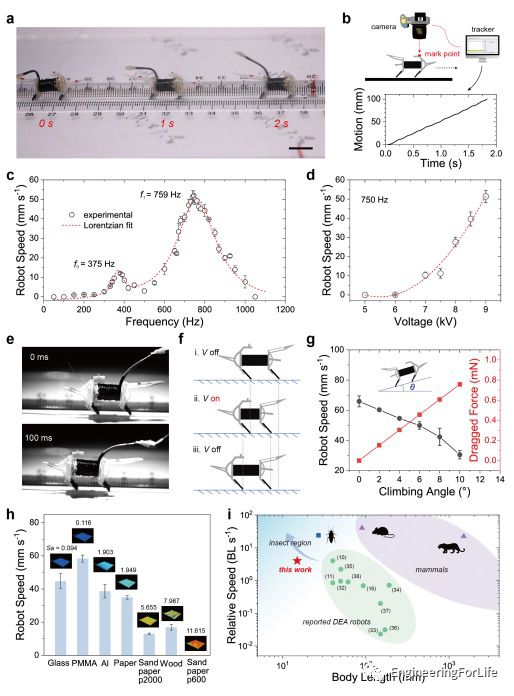
图3 机器人运动性能
该机器人可在驱动状态下受到外部挤压而不损毁,并可快速恢复前进功能。在受到挤压时,机器人驱动器还可通过电流变化展示出其自感知能力。
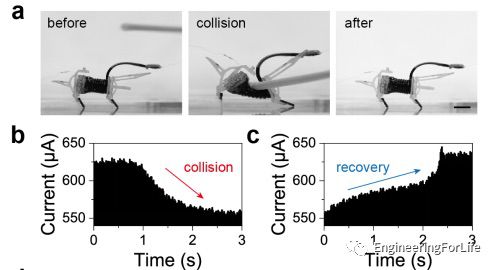
图4 机器人的鲁棒性和自感知能力
该项目的研究为超快昆虫级介电弹性体机器人的制造提供了一种可行方案,对电活性材料的设计、制造和应用具有很好的借鉴和指导意义。
文章来源:https://pubs.acs.org/doi/full/10.1021/acsmaterialslett.2c00991
(责任编辑:admin)

 Conflux Technology 获110
Conflux Technology 获110 通用汽车向Forge Nano投资
通用汽车向Forge Nano投资 华中科技大学:增材制造Si
华中科技大学:增材制造Si 赋能汽车、医疗等行业|TP
赋能汽车、医疗等行业|TP Amnovis利用3D打印技术制
Amnovis利用3D打印技术制 国产连续纤维3D打印开拓
国产连续纤维3D打印开拓最新内容
 创想三维2023全球
创想三维2023全球 上海交大谷国迎教
上海交大谷国迎教 3D打印假体植入内
3D打印假体植入内 FRI:降脂油包水
FRI:降脂油包水 少年骨折后感染致
少年骨折后感染致 打出一片“新天地
打出一片“新天地热点内容


