多无人机协同3D打印盖房子,研究登上Nature封面
时间:2022-09-23 10:19 来源:机器之心 作者:admin 阅读:次
无人机 3D 打印:

本周三,这一研究成果登上了《自然》封面。

论文地址:https://www.nature.com/articles/s41586-022-04988-4

为了展示无人机的能力,研究人员使用泡沫和一种特殊的轻质水泥材料,建造了高度从 0.18 米到 2.05 米不等的结构。与预想的原始蓝 图相比,误差不到 5 毫米。
为了证明该系统可以处理更复杂的无人机编队,该团队使用无人机上的灯光创建了一个光迹延时序列,模拟制作一个高高的圆顶状结构。
该研究的领导者、英国帝国理工学院空中机器人实验室主任 Mirko Kovac 表示:这种方法可以用于在北极甚至火星上建造建筑物,或者帮助修复通常需要昂贵的脚手架的高层建筑。不过,目前该技术还受到一些限制,因为无人机难以承载重物,需要定期充电,并且仍然需要人工监督。然而,研究人员表示,他们希望通过在项目研究期间自动为无人机充电来缓解其中的一些问题。
无人机 3D 打印是怎么实现的?对此,研究者们构建了一套精密的体系。
研究介绍
为了提高生产率和安全性,人们提出了基于机器人的建筑技术,以用于建筑构件的组装和自由形式的连续增材制造 ( AM,additive manufacturing ) 。与基于组装的方法相比,自由形式的连续增材制造能够灵活生产几何变量设计,具有效率高、成本低等特点。然而,这些大型系统需要与电源连接,检查、维护、修理不方便,难以在恶劣环境中制造等困难。
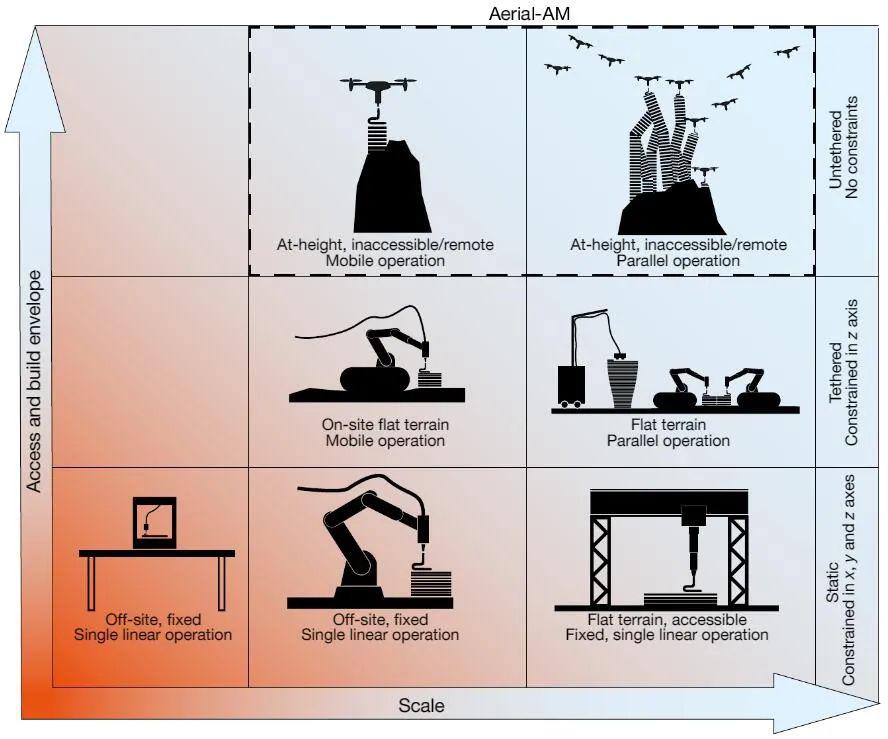
作为大型单个机器人系统的替代方法,小型移动机器人可以提供更大的灵活性和可扩展性。然而,使用机器人编队进行建筑的研究还处于发展的早期探索阶段。此外,目前多机器人操作高度有限,超过一定范围就不行了。下图展示了建筑行业中为增材制造开发的 SOTA 机器人平台之间的对比。
与当前的机器人系统及其固有局限性相比,自然建造者在建筑时表现出了更强的适应性,许多借助飞行和增材建造方法来做到这一点。例如,燕子可以在材料来源和建筑地之间进行 1200 次飞行以逐步完成巢穴。白蚁和黄蜂等群居昆虫则表现出了更大程度的适应性和可扩展性:由社会黄蜂进行的空中施工显示了高效和直接的路径优化,减轻了在整个建筑过程中的导航需求。
这些自然系统启发了使用多智能体进行集体建设的方法,这种方法需要解决当前可用技术之外的多智能体协调问题。除了多机器人系统的集体交互方法外,材料设计和使用以及环境操纵机制必须整合和共同开发,以实现合作建设。帝国理工提出的体系被称为 Aerial-AM,它将生物合作机制与工程原理相结合,使用多个无人机来实现。
无人机团队实现自主增材制造需要并行开发多项关键技术,其中包括:1)能够进行高精度材料沉积和打印质量,实时定性评估的空中机器人;2)空中机器人团队能够相互广播自己的活动,无线共享数据,互不干扰;3)自主导航和任务规划系统,结合打印路径策略自适应地确定和分配制造任务;4)设计或选择材料规划,特别是轻质和可打印的水泥混合物,适用于空中增材制造方法,无需模板或临时脚手架。
Aerial-AM 使用两种类型的空中机器人平台,分别被称为 BuilDrone 和 ScanDrone,BuilDrone 用于堆砌物理材料,ScanDrone 用于在每层材料沉积后执行增量空中扫描和验证观察。两个机器人平台都经由分布式多代理方法在各自工作流上进行了协调。构建循环包括 BuilDrones 和 ScanDrone 的飞行中打印性能表征、BuilDrones 的实时轨迹适应和材料打印,以及通过 ScanDrone 和人类监督人员进行的打印效果验证。
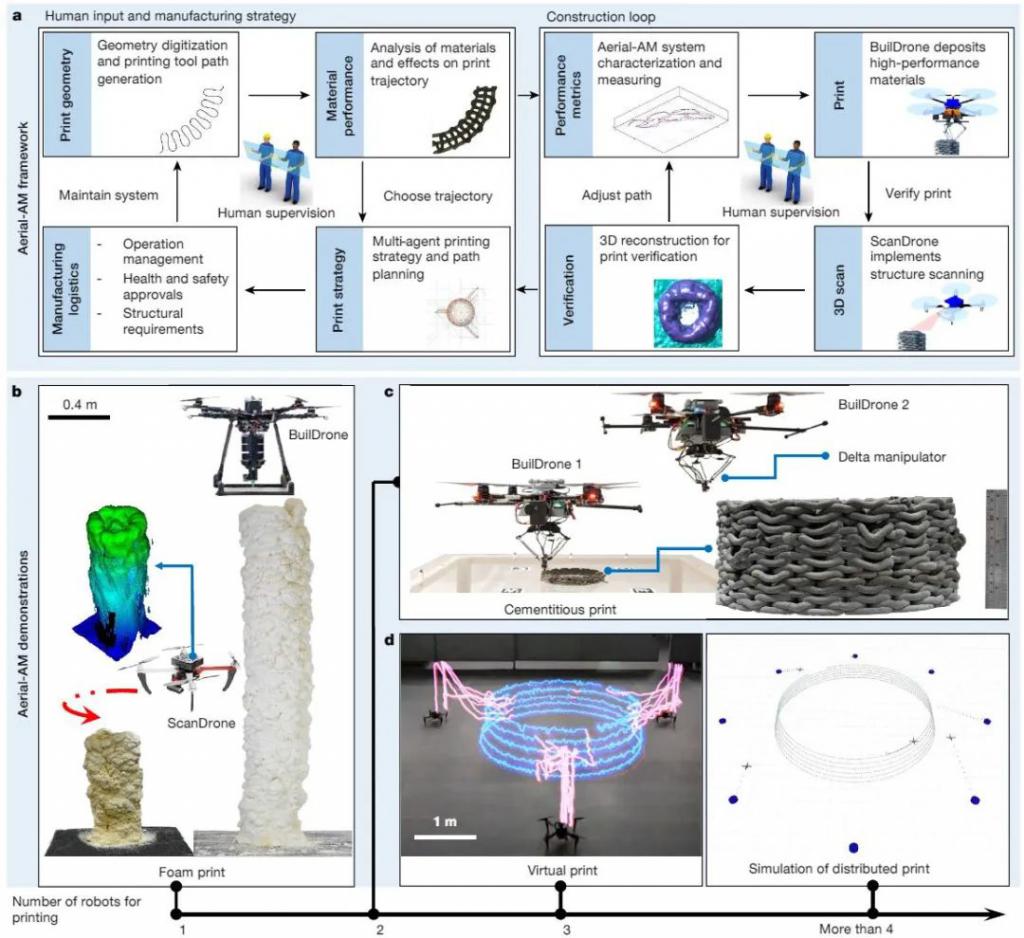
图 2. 用于不受限制和无界增材制造的 Aerial-AM 框架。
新研究提出的多智能体 Aerial-AM 框架由两个循环组成,分别在规划的慢时间尺度和实时操作的快时间尺度上运行,用于制造和进度观察。在概念验证中,研究者们利用 ScanDrone 机载视觉系统进行 3D 扫描以映射进度,使用膨胀泡沫材料构建了一个大型圆柱体。
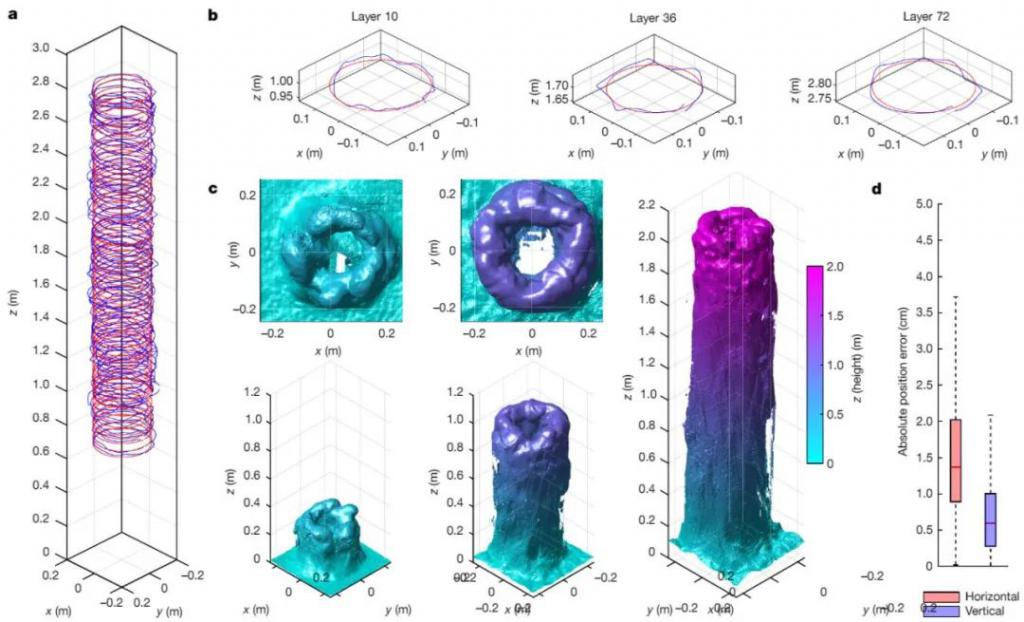
图 3. Aerial-AM BuilDrone 打印了 2.05 m 高的圆柱形几何图形,其中包含 72 次材料沉积行程,并由 ScanDrone 进行实时打印评估。
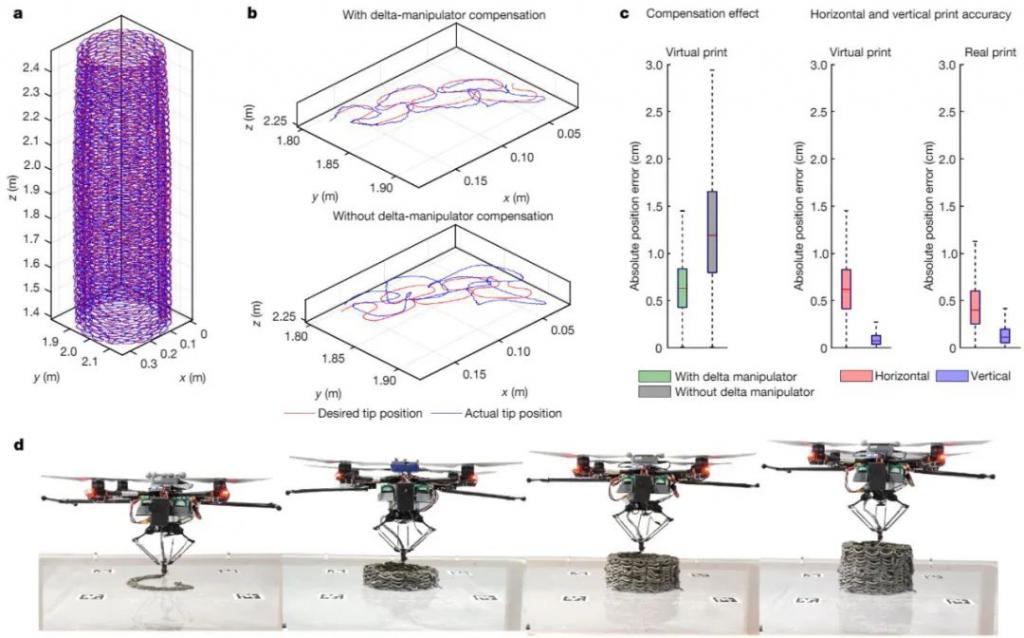
图 4. 两台 BuilDrones 使用误差补偿 delta 机械手对薄壁圆柱体进行 3D 打印,以沉积胶结材料。
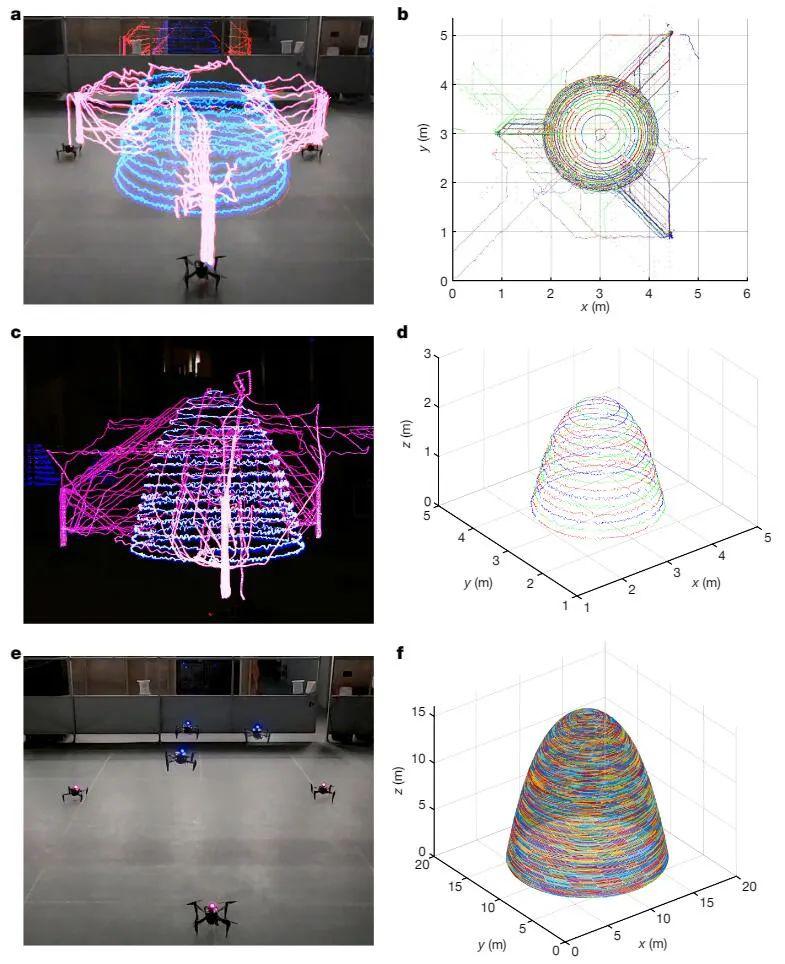
图 5. Aerial-AM 多机器人光轨虚拟打印圆顶状旋转表面。a、c 是飞行轨迹,b、d 是顶视图和透视图。f 展示了使用 15 个机器人打印放大版几何图形的模拟结果,其底径为 15 m。
通过 BuilDrone 的材料沉积和 ScanDrone 对打印结构进行实时定性评估,研究人员成功打印出了高达 2.05 米的圆柱体,证明了
Aerial-AM 方法制造大型几何物体的能力。水泥薄壁圆柱体的制造实验证明,自对准平行 delta 机械手与 BuilDrone
的耦合允许在横向和垂直方向以高精度(最大 5 毫米位置误差)沉积材料,这个水平在英国的建筑要求允许范围之内。虚拟光轨增材制造 和仿真结果表明,Aerial-AM 框架可以通过并行多机器人制造有效地打印各种几何形状,同时解决拥堵,并在异常情况下完成自适应。尽管这些实验成功地验证了 Aerial-AM 的可行性,但它们只是探索使用空中机器人进行建筑的潜力的第一步。研究人员表示,要想实现无人机 3D 打印盖房,还需要在机器人技术和材料科学方面取得重大进展,特别是支撑材料的沉积、活性材料的固化和多机器人之间任务共享等前沿领域进行发展。
而对于无人机本身,为使研究成果走出实验室,研究者们正打算实施具有差分全球定位系统(GPS)的多传感器同时定位和制图(SLAM)系统,以提供足够的室外定位。
在实用化之后,Aerial-AM 或许可以提供一种替代方式来支持偏远地区的住房和重要基础设施建设。
(责任编辑:admin)

 Conflux Technology 获110
Conflux Technology 获110 通用汽车向Forge Nano投资
通用汽车向Forge Nano投资 华中科技大学:增材制造Si
华中科技大学:增材制造Si 赋能汽车、医疗等行业|TP
赋能汽车、医疗等行业|TP Amnovis利用3D打印技术制
Amnovis利用3D打印技术制 国产连续纤维3D打印开拓
国产连续纤维3D打印开拓最新内容
 创想三维2023全球
创想三维2023全球 上海交大谷国迎教
上海交大谷国迎教 3D打印假体植入内
3D打印假体植入内 FRI:降脂油包水
FRI:降脂油包水 少年骨折后感染致
少年骨折后感染致 打出一片“新天地
打出一片“新天地热点内容


