《Science》:3D打印超材料微型机器人,郑小雨教授团队
时间:2022-06-17 15:53 来源:南极熊 作者:admin 阅读:次
此次打印的微型机器人使用超材料,只有硬币大小,只需要为机器人供电,它就能够可按照设置的程序自行移动,没有复杂的传动系统。
这项项研究的首席研究员、UCLA工程学院助理教授郑小雨表示:新方法将复杂的运动、多种传感模式和可编程决策能力紧密集成在一起,类似于生物系统中的神经、骨骼和肌腱协同工作,以执行受控运动。
那么这款3D打印的微型机器人究竟是如何实现运动的呢?
首先,我们需要了解一下什么是超材料:
超材料(英文:Metamaterial), 拉丁语词根“meta-”表示“超出、另类”等含义。指的是一类具有特殊性质的人造材料,这些材料是自然界没有的。它们拥有一些特别的性质,比如让光、电磁波改变它们的通常性质,而这样的效果是传统材料无法实现的。超材料的成分上没有什么特别之处,它们的奇特性质源于其精密的几何结构以及尺寸大小。其中的微结构,大小尺度小于它作用的波长,因此得以对波施加影响。 对于超材料的初步研究是负折射率超材料。
超材料的奇异性质使它具有广泛的应用前景,从高接收率天线,到雷达反射罩甚至是地震预警。
超材料是一个跨学科的课题,囊括电子工程、凝聚态物理、微波、光电子学、经典光学、材料科学、半导体科学以及纳米科技等等。
那么,通过3D打印技术制造特定的晶格结构,并将不同的晶格结构组合在一起,就能实现特定的功能。比如论文中使用的压电超材料是一种复杂的晶格材料,可以根据电场来改变形状和移动,也可以基于外界受力而产生电荷。
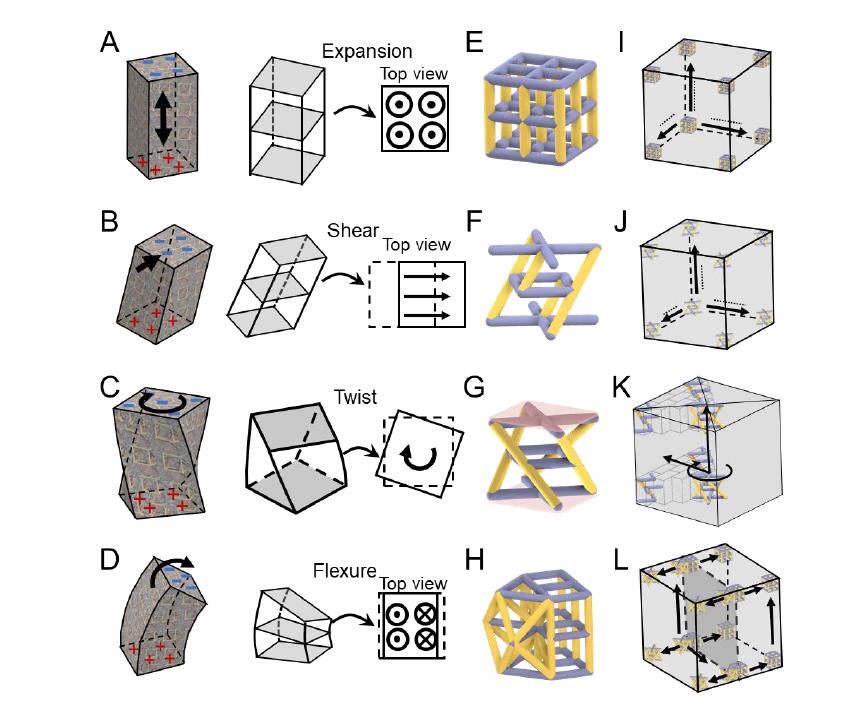
△具有膨胀、剪切、扭转和弯曲应变模式的超材料的特征平面、单元格和镶嵌方法的运动示意图
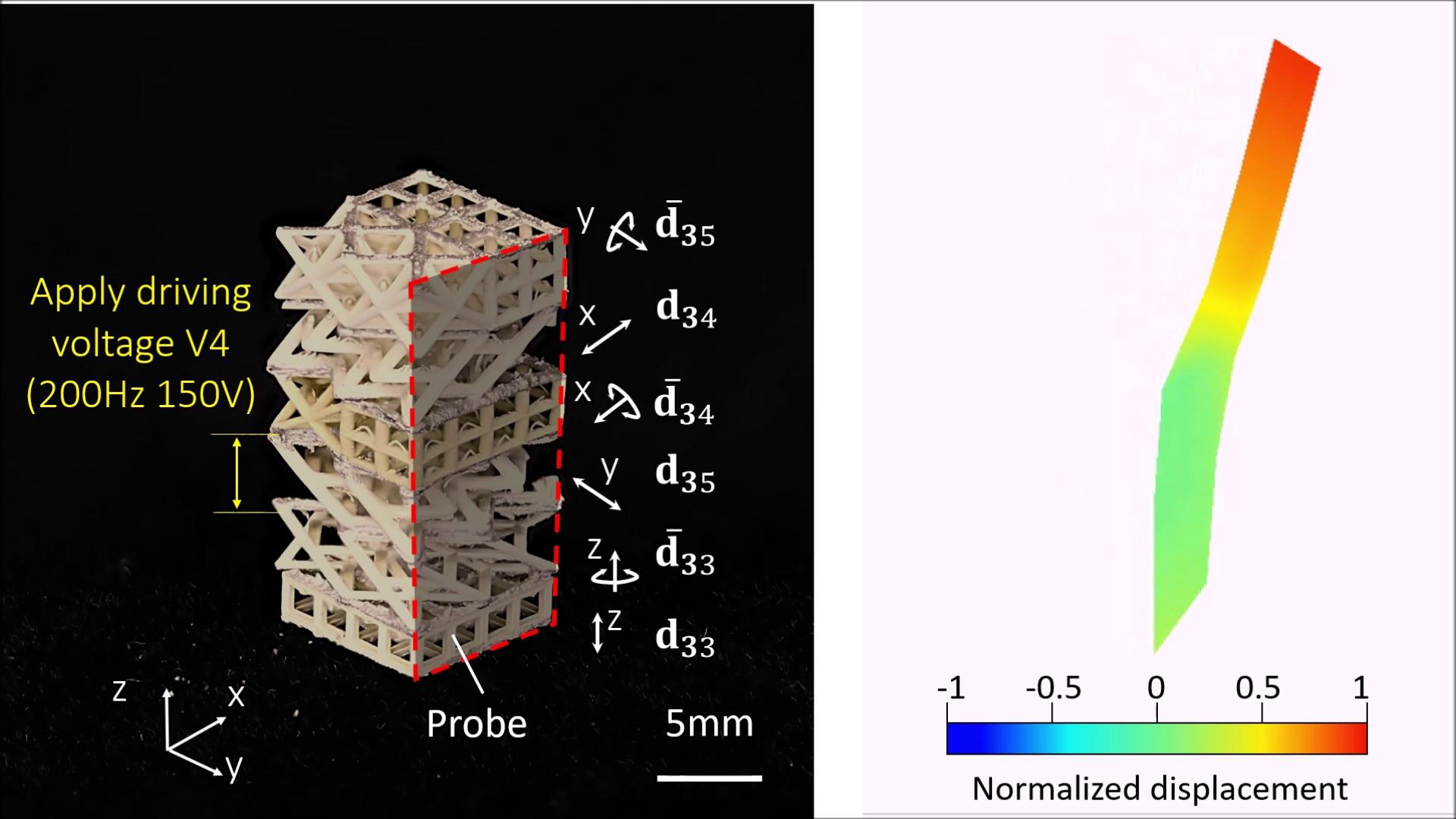
△3D打印的压电超材料晶格,构成了微型机器人的单元
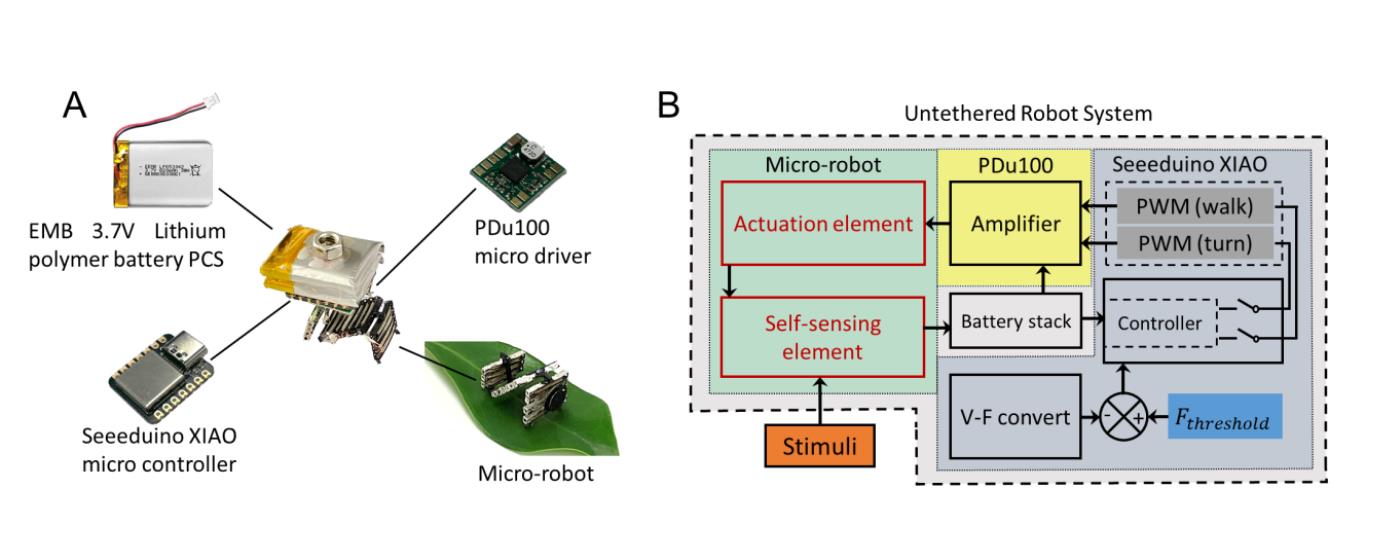
△电池供电的机器人的组装及其控制回路的设计
再将多个微型机器人单元组合成特定的形状,在通电之后每个单元的形状改变,让机器人实现了移动的效果。通过改变电源的电压、频率等参数,还可以让微信机器人的运动模式发生变化。
研究人员在视频中展示了微型机器人的运动模式,转向模式,跳跃模式,受到攻击之后转向,过S弯以及砂石路面上的行走。
这个3D打印的超材料微型机器人的尺寸仅有一枚硬币大小,大大简化了常规的运动系统,未来可能会有广泛的应用价值。比如在生物医疗领域,制作微型体内“游泳机器人”,也可以用于宏观尺寸的危险环境探索等。
原文链接:
https://www.science.org/doi/10.1126/science.abn0090
(责任编辑:admin)

 Conflux Technology 获110
Conflux Technology 获110 通用汽车向Forge Nano投资
通用汽车向Forge Nano投资 华中科技大学:增材制造Si
华中科技大学:增材制造Si 赋能汽车、医疗等行业|TP
赋能汽车、医疗等行业|TP Amnovis利用3D打印技术制
Amnovis利用3D打印技术制 国产连续纤维3D打印开拓
国产连续纤维3D打印开拓最新内容
 创想三维2023全球
创想三维2023全球 上海交大谷国迎教
上海交大谷国迎教 3D打印假体植入内
3D打印假体植入内 FRI:降脂油包水
FRI:降脂油包水 少年骨折后感染致
少年骨折后感染致 打出一片“新天地
打出一片“新天地热点内容


