一种模拟人体皮肤微结构感知行为的高灵敏度柔性触觉传感器
时间:2021-10-28 08:45 来源:机械制造系统工程国家重点实验室 作者:admin 阅读:次
中国科学院上海高等研究院的研究团队受到人类手指纹理的启发,通过模拟人体皮肤的结构和传感机制,将聚二甲基硅氧烷(PDMS)微球与石墨烯相结合,设计出了一种3D打印柔性触觉传感器,旨在通过对触觉信号的处理来检测各种级别的表面粗糙度。
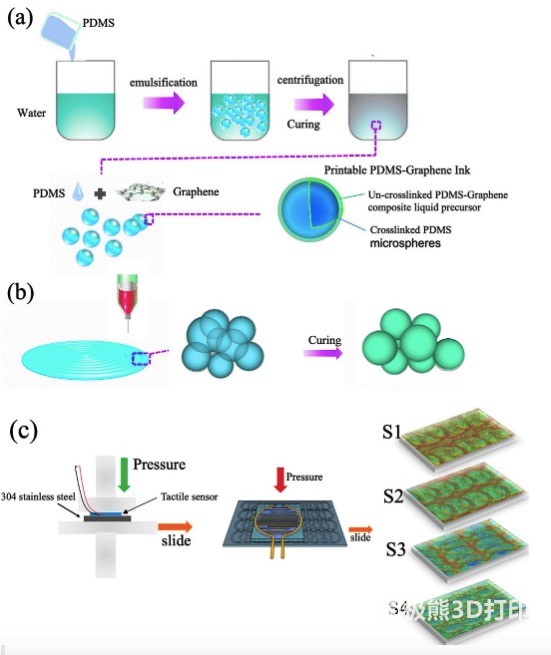
图1 触觉传感器设计原理和打印流程。(a)PDMS-石墨烯复合油墨的制备流程图;(b)传感器层3D打印示意图;(c)通过处理触觉信号区分不同粗糙度表面示意图
研究人员利用乳化的方法制备了PDMS微球,并且通过利用未交联的PDMS-石墨烯混合溶液对PDMS微球形成包覆,制备的石墨烯-PDMS微球油墨可以通过喷头挤出形成三维立体结构,并通过热固化成型。所构建的具有石墨烯-PDMS微球结构的触觉传感器显示出优异的综合机械性能,传感层的断裂伸长率为70%,响应时间为60ms,灵敏度达2.4kPa-1,循环稳定性优异。此外,这种多功能性和灵敏度使电子皮肤不仅可以准确监测压力,还可以区分具有微尺度差异的各种表面形貌,并检测空气流体。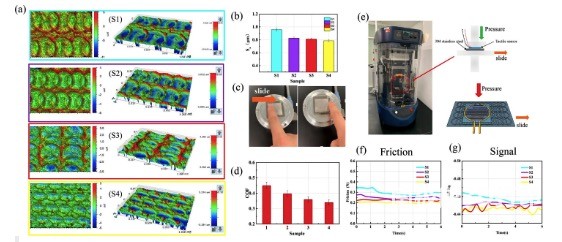
图2
(a)激光加工表面S1、S2、S3、S4的3D形貌;(b)不同表明的平均粗糙度Sa;(c)手指对不同粗糙度表面的触觉响应实验结果示意图;(d)手指与不同表面之间的平均摩擦系数;(e)用于测试电阻变化的实验装置;(f)在压力载荷作用下,不同粗糙度表面上的摩擦力曲线;(g)摩擦力作用下的电阻变化响应
这项研究表明所构建的石墨烯-PDMS微球触觉传感器不仅可以检测不同粗糙度的表面,应用到电子皮肤中,还可以扩展到其他应用,例如气流监测和声音检测等。(责任编辑:admin)

 Conflux Technology 获110
Conflux Technology 获110 通用汽车向Forge Nano投资
通用汽车向Forge Nano投资 华中科技大学:增材制造Si
华中科技大学:增材制造Si 赋能汽车、医疗等行业|TP
赋能汽车、医疗等行业|TP Amnovis利用3D打印技术制
Amnovis利用3D打印技术制 国产连续纤维3D打印开拓
国产连续纤维3D打印开拓最新内容
 创想三维2023全球
创想三维2023全球 上海交大谷国迎教
上海交大谷国迎教 3D打印假体植入内
3D打印假体植入内 FRI:降脂油包水
FRI:降脂油包水 少年骨折后感染致
少年骨折后感染致 打出一片“新天地
打出一片“新天地热点内容


