清华大学:用于毫米尺度3D物体操纵的喇叭状粘附结构
时间:2021-09-24 17:48 来源:南极熊 作者:admin 阅读:次
对于毫米尺度3D物体的操纵技术在电子转印、精密装配、微机电系统等领域具有重要的应用前景。传统的基于机械夹持的抓取方案(如镊子等)需要针对不同特征的物体进行专门的设计和定制。例如,普通的尖头镊子难以夹持球体,需要在镊子末端设计专门的环形结构,并且具有环形结构的镊子无法夹持直径小于环形的球体。此外,对于平放在基底表面上的薄片状脆性物体(如硅片等)来说,因其无特殊的可夹持特征,使用镊子等工具难以将其从基底表面夹持住。目前,对于毫米尺度的不同形状和尺寸的3D物体进行可控抓取操纵的通用性技术方案仍然面临挑战。
近日,清华大学机械工程系摩擦学国家重点实验室的田煜教授课题组提出了一种毫米尺度的喇叭状可控粘附结构及其力学调控方法。喇叭状粘附结构由面投影微立体光刻技术(nanoArch S130,摩方精密)和多步浇铸的工艺方案制备而成,对于多种曲率表面具有良好的自适应接触性能。喇叭状可控粘附结构能够通过接触界面的范德华力作用和负压作用达到~80 kPa的粘附强度,通过外力调控屈曲失稳与基底表面主动脱附,从而实现对于多种三维物体的可控抓取和操纵。该项研究成果以“Trumpet-shaped controllable adhesive structure for manipulation of millimeter-sized objects”为题发表在国际知名期刊《Smart Materials and Structures》上。该研究工作由清华大学机械工程系摩擦学国家重点实验室的博士生李小松完成。
原文链接:https://iopscience.iop.org/article/10.1088/1361-665X/ac262f
近日,清华大学机械工程系摩擦学国家重点实验室的田煜教授课题组提出了一种毫米尺度的喇叭状可控粘附结构及其力学调控方法。喇叭状粘附结构由面投影微立体光刻技术(nanoArch S130,摩方精密)和多步浇铸的工艺方案制备而成,对于多种曲率表面具有良好的自适应接触性能。喇叭状可控粘附结构能够通过接触界面的范德华力作用和负压作用达到~80 kPa的粘附强度,通过外力调控屈曲失稳与基底表面主动脱附,从而实现对于多种三维物体的可控抓取和操纵。该项研究成果以“Trumpet-shaped controllable adhesive structure for manipulation of millimeter-sized objects”为题发表在国际知名期刊《Smart Materials and Structures》上。该研究工作由清华大学机械工程系摩擦学国家重点实验室的博士生李小松完成。
原文链接:https://iopscience.iop.org/article/10.1088/1361-665X/ac262f
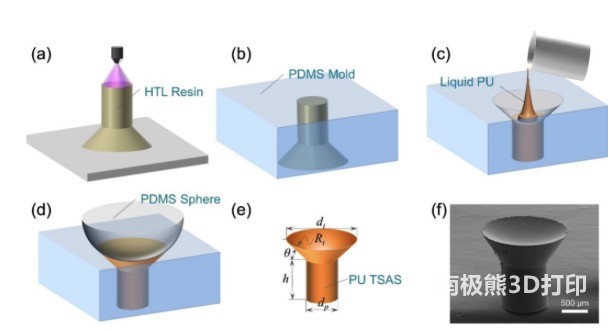
图1 喇叭状可控粘附结构制备工艺流程图。(a)由面投影微立体光刻技术直接制备得到的蘑菇状结构;(b)通过浇铸得到阴模模具;(c)阴模模具浇铸PU并脱泡;(d)将PDMS球面按压模具得到凹面结构;(e)脱模后的喇叭状结构(dp = 1 mm, h = 1 mm, dt = 1.8 mm, θ =60o);(f)喇叭状结构的扫描电镜照片。
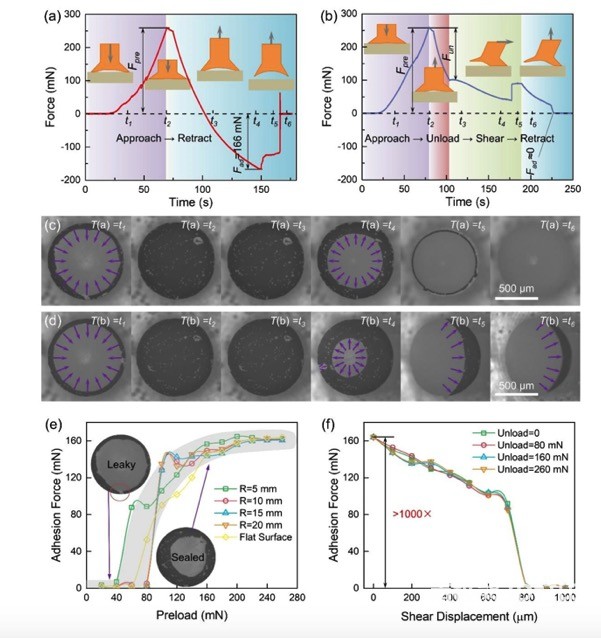
图2
喇叭状粘附结构的粘附性能典型测试力曲线和对应的接触状态演化规律。(a)附着测试模式和(b)脱附测试模式对应的典型法向力测试曲线;(c)附着测试模式和(d)脱附测试模式对应的接触界面状态演化过程;(e)附着测试模式下喇叭状粘附结构的粘附力和预载荷之间的关系;(f)脱附测试模式下喇叭状粘附结构的粘附力和剪切距离的关系。
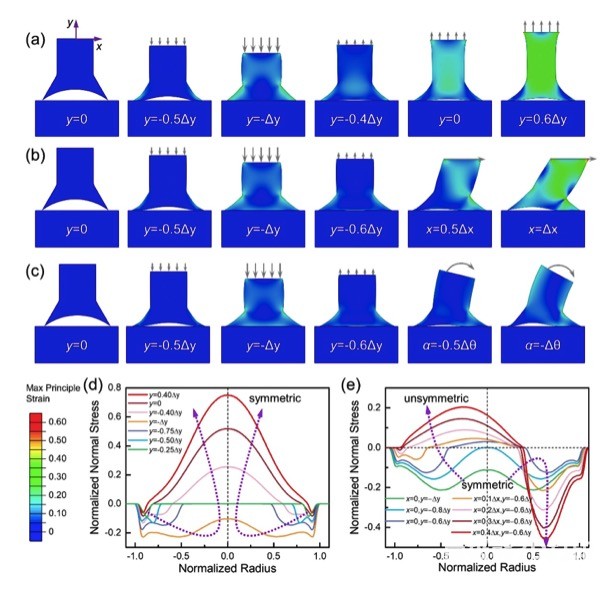
图3 基于内聚力模型的喇叭状可控结构的有限元仿真与界面法向应力演化规律机理。(a)接触-脱附测试过程;(b)接触-卸载-剪切测试过程;(c)接触-卸载-扭转过程中喇叭状粘附结构的变形行为;(d)附着测试过程和(e)脱附测试过程中接触界面法向应力的演化规律,其中紫色的箭头表示法向应力分布的变化方向。
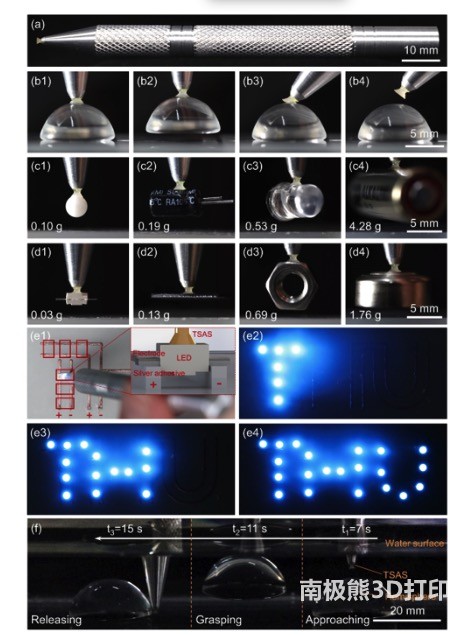
图4
喇叭状可控粘附结构对不同大小、不同形状、不同质量、不同材质物体的操纵效果。(a)集成喇叭状粘附结构的操作器;(b)喇叭状粘附结构抓取、转移和释放物体的典型操作步骤;喇叭状粘附结构用于转移多种毫米尺度(c)平面物体和(d)曲面物体的展示;(e)喇叭状粘附结构用于操纵LED灯珠完成THU字样柔性电路装配的展示;(f)喇叭状粘附结构用于水下环境操纵曲面物体的展示。
(责任编辑:admin)

 Conflux Technology 获110
Conflux Technology 获110 通用汽车向Forge Nano投资
通用汽车向Forge Nano投资 华中科技大学:增材制造Si
华中科技大学:增材制造Si 赋能汽车、医疗等行业|TP
赋能汽车、医疗等行业|TP Amnovis利用3D打印技术制
Amnovis利用3D打印技术制 国产连续纤维3D打印开拓
国产连续纤维3D打印开拓最新内容
 创想三维2023全球
创想三维2023全球 上海交大谷国迎教
上海交大谷国迎教 3D打印假体植入内
3D打印假体植入内 FRI:降脂油包水
FRI:降脂油包水 少年骨折后感染致
少年骨折后感染致 打出一片“新天地
打出一片“新天地热点内容


