北理工:基于微尺度3D打印制备的仿生功能表面在力场调控下实现黏附自清洁
时间:2021-08-27 09:11 来源:南极熊 作者:admin 阅读:次
是什么让蜘蛛侠能够飞檐走壁?又是什么让年逾50的阿汤哥只身一人攀爬世界第一高楼-――哈利法塔?尽管这些是科幻电影中的片段,但现实生活中早已有活生生的例子:壁虎。该生物不仅在洁净基底上具有超强黏附力,同时在沾满灰尘的表面依旧能够自由爬行,表明其黏附系统具有“自清洁”功能。有研究指出,壁虎之所以具有如此优异的功能是因为其脚趾具有成千上万的铲状绒毛。
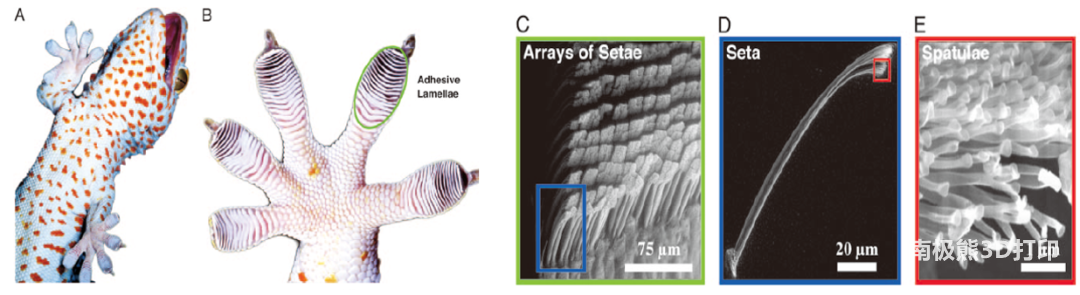
图1.壁虎脚掌黏附系统的结构
近日,受壁虎行为启发,北京理工大学先进结构技术研究院的陈少华教授课题组提出了一种仿生微柱功能表面通过力场调控实现自清洁功能的研究。该自清洁功能表面是结合微尺度3D打印技术(nanoArch P140,摩方精密)制备得到,其在颗粒筛选、运输等领域具有重要的应用前景。研究成果以“Self-Cleaning Performance of the Micropillar-Arrayed Surface and Its Micro-Scale Mechanical Mechanism” 为题发表在国际知名期刊《Langmuir》上。该研究工作由北京理工大学先进结构技术研究院博士生安华贞完成。
原文链接:
https://pubs.acs.org/doi/10.1021/acs.langmuir.1c01398
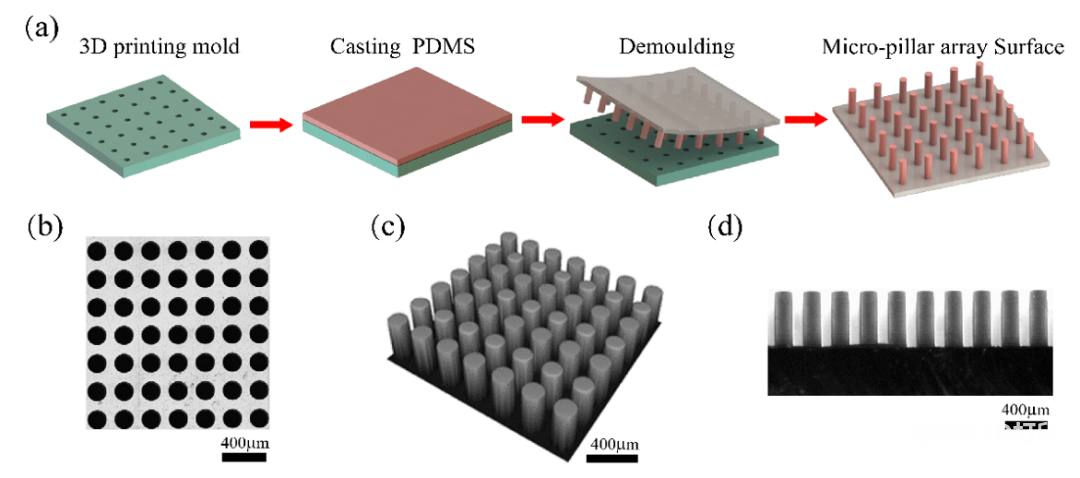
图2. 微柱阵列表面的实验制备工艺如图(a)所示,首先通过微尺度3D打印技术(nanoArch P140,摩方精密)打印出光敏树脂微孔阵列模具,然后倒模获得PDMS微柱阵列表面;(b)微孔模具的激光共聚焦俯视图;(c)微柱阵列表面的激光共聚焦三维结构图,其中,微柱直径、高以及两微柱中心距分别为180μm、550μm、280μm,该微柱的大小与3D打印的微孔模具相同;(d)微柱阵列表面的侧视图。
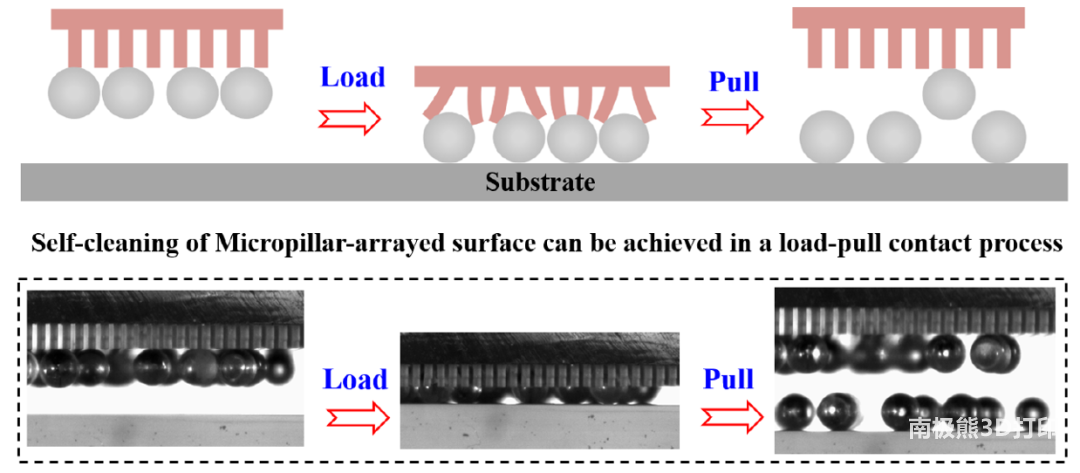
图3.微柱功能表面在Load-Pull接触过程下的自清洁性能
通过微尺度3D打印技术结合模板复制工艺制备出微柱阵列表面,在施加Load-pull的加载条件下研究了接触压力、颗粒尺寸等因素对微柱阵列表面自清洁行为的影响,并分析了其中的微观力学机制。研究结果发现,微柱阵列表面实现自清洁的主要微观力学机制为:在接触压力的作用下,颗粒与微柱的接触状态由黏附状态改变为易清洁的沉积状态。此研究不仅有助于深入理解微柱阵列表面的自清洁机理,而且为自清洁功能化表面的设计及微颗粒的可控粘附与输运等提供技术支持。
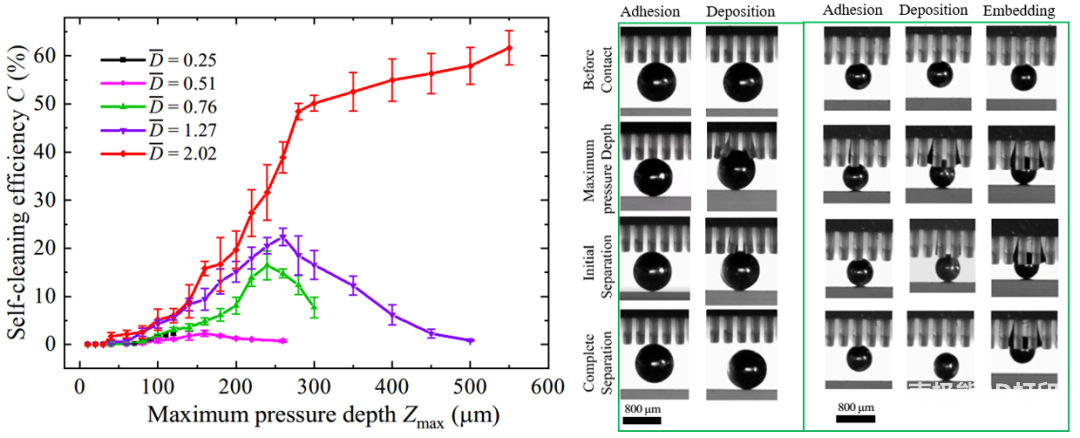
图4.微柱阵列表面对不同尺寸颗粒的自清洁性能及微观机理
(责任编辑:admin)

 Conflux Technology 获110
Conflux Technology 获110 通用汽车向Forge Nano投资
通用汽车向Forge Nano投资 华中科技大学:增材制造Si
华中科技大学:增材制造Si 赋能汽车、医疗等行业|TP
赋能汽车、医疗等行业|TP Amnovis利用3D打印技术制
Amnovis利用3D打印技术制 国产连续纤维3D打印开拓
国产连续纤维3D打印开拓最新内容
 创想三维2023全球
创想三维2023全球 上海交大谷国迎教
上海交大谷国迎教 3D打印假体植入内
3D打印假体植入内 FRI:降脂油包水
FRI:降脂油包水 少年骨折后感染致
少年骨折后感染致 打出一片“新天地
打出一片“新天地热点内容


