主动、非接触式的结构光3D扫描技术
时间:2016-06-17 12:17 来源:天工社 作者:中国3D打印网 阅读:次
随着很多全新技术的涌现,人们越来越需要用3D方法来表示现实世界中的物体。特别是机器视觉和机器人技术,它们都得益于精确和自适应的3D捕捉功能。其它针对3D扫描的应用包括生物识别、安防、工业检查、质量控制、医疗、牙科和原型设计。
3D扫描是提取一个物体的表面和物理测量,并用数字的方式将其表示出来。这些数据被采集为一个由X,Y和Z坐标(表示物体外部表面)组成的点云。对于一个3D扫描的分析可以确定被扫描物体的表面积、体积、表面形状、外形和特征尺寸。
一个3D扫描仪需要一个探针来确定到物体表面上每一个点的距离。理论上,这个探针可以是一个触觉(物理接触)探针。然而,很多应用需要非接触式测量。只使用光照来探测感兴趣物体的光学技术提出了针对这个问题的解决方案。其中一个方法至少采用2个摄像头来提供立体感视觉技术,它对于计算的要求通常比较严格,并且对于环境光照条件很敏感。另外一个方法采用结构照明图形,它只需一个投影仪(用于生成光图形)以及一个单摄像头和计算能力中等的算法。
结构光
结构光是3D扫描的一个光学方法,它投射出一组用数学方法构造的光图形,按照一定顺序照亮被测量的物体。一个到投影仪的距离已知的摄像头同步捕捉一组被照亮物体的图像。相对于用于校准的平面基准表面,摄像头看到的图形被经扫描物体的表面形状所扭曲。几何三角剖分的原理使得计算被扫描物体表面上每个点的XYZ坐标成为可能(见图01)。然后,获得的点云数据用于被扫描物体表面详细3D模型的计算构造。
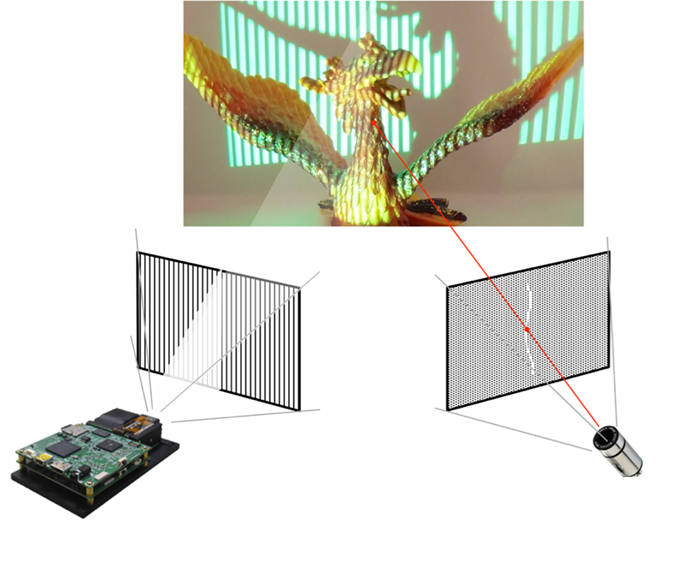
图01:使用DLP® 技术的结构光
(责任编辑:admin)

 纳米纤维涂层管状支架骨再
纳米纤维涂层管状支架骨再 中美合作团队《Science》
中美合作团队《Science》 内燃机增材再制造修复技术
内燃机增材再制造修复技术 高性能金属激光增材制造装
高性能金属激光增材制造装 西安交大与哈佛大学合作研
西安交大与哈佛大学合作研 仿真技术与3D打印推动液压
仿真技术与3D打印推动液压最新内容
 科学家使用超声波
科学家使用超声波热点内容


