南洋理工开发基于移动机器人的3D打印混凝土结构系统
由于缺乏移动性和体积小等问题,限制了对3D打印建筑的采用,并且同步移动机器人的使用是开始解决可伸缩性问题的好地方。但是现在,Cuong教授及其团队正在将事情推向新的高度。他们仍在使用移动机器人进行边走边打印的方法,但他们开发了一个单机器人工业增材制造平台,而不是成对系统,该平台可以自行完成大规模的建筑打印。“我们的系统安装在移动机器人上。能够在太空中移动机器人基座的能力使我们的机器人可以打印比自身更大的结构。” Cuong教授解释说。 “此外,拥有可移动的底座还可以更轻松地将机器人带入施工现场并在内部移动。”
据中国3D打印网了解,建筑和构造最近已成为机器人技术的激动人心的应用领域。特别是,材料配方和机器人技术的快速进步使机器人的3D打印混凝土成为现场施工的有希望的技术。然而,可扩展性仍然是广泛采用的重要障碍:打印系统(基于龙门式或基于臂式)通常比要打印的结构要大得多,因此很麻烦。最近,有人提出了一种移动打印系统(一种安装在移动基座上的机械手)来缓解这一问题:通过移动基座,这样的系统可以打印出比其自身更大的结构。然而,提出的系统只能在静止时打印,从而对可以单次打印的结构的尺寸施加了限制。在这里,我们开发了一个实现移动打印范例的系统,该系统可以用一个机器人打印任意大小的单件结构。这种发展需要解决针对移动3D打印的运动计划,本地化和运动控制问题。该系统只需要一个机器人即可打印不同大小的单件结构,这也有助于确保更好的结构性能。

移动机器人3D打印系统
通常,无法打印比建筑3D打印系统的龙门立足距离宽的建筑材料。那是因为打印结构的尺寸受到以下三项之一的限制:机械臂的范围,门架的受限体积或使打印头能够沿特定轴移动的框架。但是,NTU研究人员通过将工业机器人操纵器安装到带轮底座上,使他们的系统可以在任何方向上移动,只要它在平坦的表面上即可。然后,使用软管将平台的机械手法兰喷嘴连接到泵。
为了实现协调一致的工作,在新系统中精心计划了机器人操纵器的运动以及移动平台的运动。它使用反馈运动控制和高度精确的机器人定位,以确保喷嘴以正确的速度在正确的位置沉积混凝土材料。通过将相机放置在移动底座的背面,其“定位系统”在更大的表面积上效果更好。

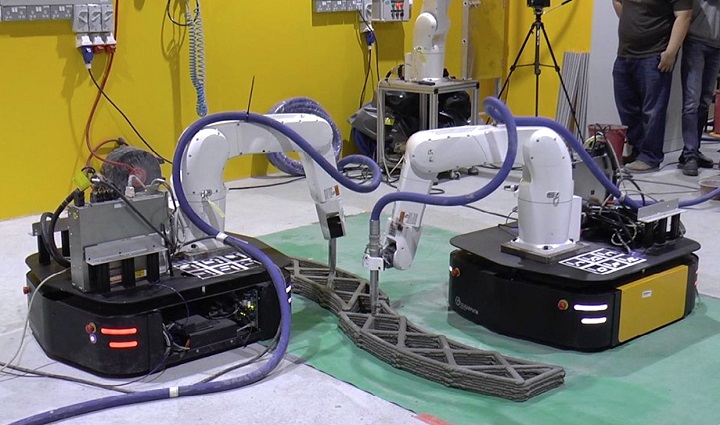
南大3D打印系统设置和打印流程管道模型
NTU研究小组声称,他们的边走边打印系统可以增加一个机器人可以制造的结构的尺寸。为了证明这一点,他们使用该平台3D打印210 x 45 x 10厘米的单体混凝土结构,该结构肯定比机械臂的87厘米更大。该系统可以显着提高施工3D打印的效率。但是,他们的工作尚未完成,因为该系统仍然存在一些局限性,特别是在工作区域不均匀方面。 Cuong教授解释说:“我们正计划向我们的机器人添加协作功能。这样做的想法是让操作人员用手拿着机器人,然后将其沿建筑工地移向所需位置,并引导它实现高精度组装。”
NTU小组由Mehmet Efe Tiryaki,Xu Zhang和Cuong教授组成,发表了有关其新系统的论文,标题为“移动打印:大型机器人3D打印的新范例”。
中国3D打印网编译文章!
(责任编辑:admin)

 COBOD发布新一代建筑3D打
COBOD发布新一代建筑3D打 RIC推出新型便携模块化混
RIC推出新型便携模块化混 普茨迈斯特推出 KARLOS―
普茨迈斯特推出 KARLOS― 海德堡将拥有欧洲最大的3D
海德堡将拥有欧洲最大的3D 赢创推出12×12×12米悬臂
赢创推出12×12×12米悬臂 三峡大学发布大型(15米级
三峡大学发布大型(15米级 南洋理工开发基于
南洋理工开发基于 丹麦技术大学采购
丹麦技术大学采购 世界上最大的建筑
世界上最大的建筑 ICON推出大型Vulc
ICON推出大型Vulc WASP发布用于建筑
WASP发布用于建筑

