本体感受性三维结构机器人超材料的设计与打印
时间:2023-03-22 10:12 来源:西安交通大学 作者:admin 阅读:次
目前压电驱动器由于自然环境下晶体结构的限制,导致在各个方向上电场响应的应变不同,难以实现多自由度的变形和运动,从而在应用上增加了难度;增材制造技术的进步使设计三维结构的刺激响应材料成为可能,与诸如传感、驱动和控制等功能紧密集成的生物系统不同,通过增材制造实现的结构材料具有前所未有的系统复杂性。美国加利福尼亚大学 Zheng Xiaoyu团队[1]通过增材制造技术设计了一系列制造路线,以创建一类能够以多个自由度运动,在规定方向的应变放大,从而实现具有自我感知和反馈控制的编程运动。
实验原理设计
结构材料的核心概念是将材料不受限制地放置在三维细胞拓扑中,绕过天然晶体固有的限制。研究者引入了一种策略来在三维空间中构建压电、导电和结构相(如图1所示)。这种多材料构成的超材料能够接收输入电场并输出所需的任何应变模式,包括正应变、剪切应变、扭转和弯曲模式以及它们的组合和放大。通过特征平面的旋转来表征压电材料在电场下的扭曲状态,单元内压电支柱的局部应变,无论是膨胀还是收缩,都由支柱的方向、极化和电场决定。之后将压电支柱放置在空间布局中,将局部的应变与全局运动相对应。
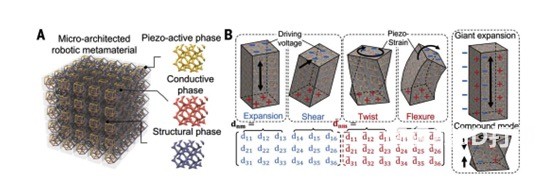
图1 超材料的应变模式设计
机器人超材料的增材制造
作者团队通过多材料的增材制造技术将压电相、结构相和导电相组装成复杂的三维微结构:首先将带负电荷的树脂和高负载的纳米粒子胶体选择性地沉积到平台上(图2A),然后将导电相选择性地沉积到树脂上,形成带有立体微结构的电极(图2B),然后,在高温下通过强电场通过沉积的金属使结构的压电陶瓷极化(图2E),极化后,未被电极覆盖的区域保持未极化的状态,并被用作结构相。而其他陶瓷如碳化硅也可以作为结构相,以提高超材料的刚度。这种制造方式实现了精确、低孔隙率和微尺度结构的装饰有导电金属并具有压电特性的3D陶瓷晶格。
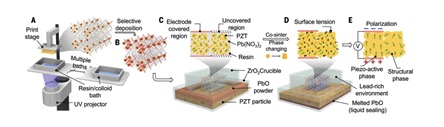
图2 机器人超材料的制造
可程序控制的应变和可感知的微型机器人
通过嵌入电极的微结构,作者团队演示了通过局部电极和微结构设计实现的应变放大、应变复合和应变加减,如图3所示;机器人可通过逆压电效应实现运动,通过压电效应实现自身感受并通过外部监测信号实现反馈控制。

图3 多自由度的应变放大和可编程的应变特性
基于开发的压电驱动器特性,作者将压电驱动器模块组装成运动结构(图4),该结构可以实现自主的移动,感知周围环境变化并作出适当反应,该结构表现出优于传统压电材料的压电特性。在集成了超声波模块之后,微型机器人能够自主地检测障碍并且实施避障操作,从而实现自主决策。这项研究通过创新的智能结构设计,有望在智能传感、自主探测和机器人智能控制等方面有所突破。
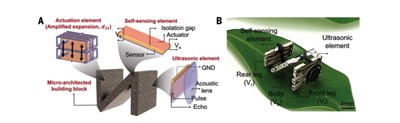
图4刺激响应的多模态移动微型机器人
参考文献:
H. Cui, D. Yao, R. Hensleigh, H. Lu, A. Calderon, Z. Xu, S. Davaria, Z. Wang, P. Mercier, P. Tarazaga, X. Zheng, Design and printing of proprioceptive three-dimensional architected robotic metamaterials, Science 376(6599) (2022) 1287-1293.
(责任编辑:admin)

 Xenia进军大幅面增材制造
Xenia进军大幅面增材制造 研究人员基于3D打印冰模板
研究人员基于3D打印冰模板 美国Brooks与惠普合作开发
美国Brooks与惠普合作开发 《AHM》:3D打印为患者定
《AHM》:3D打印为患者定 MB Therapeutics与Lynxter
MB Therapeutics与Lynxter 美国国防部正在使用3D打印
美国国防部正在使用3D打印最新内容
 美国空军引进3D砂
美国空军引进3D砂 3D打印个性化晶格
3D打印个性化晶格 伊犁州奎屯医院实
伊犁州奎屯医院实 昆士兰科技大学3D
昆士兰科技大学3D 全彩3D打印吉他在
全彩3D打印吉他在 PSAS成功发射3D打
PSAS成功发射3D打热点内容


