新加坡SUTD大学采用FL-3DP技术,实现3D打印软性机器人功能组件的新方法
时间:2022-04-11 13:31 来源:南极熊 作者:admin 阅读:次
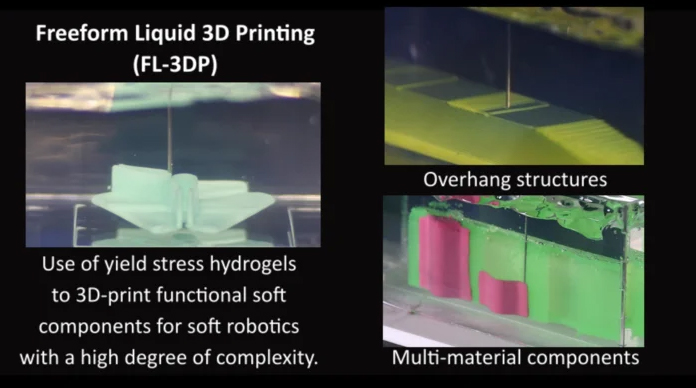
△利用屈服应力水凝胶对具有高复杂性的软性机器人的功能软组件进行3d打印。图片来自新加坡SUTD
FL-3DP是一种新兴技术,具有很高的潜力,可实现多材料功能组件的3D打印。它利用凝胶作为临时悬浮介质,墨水在其中喷射并保持在适当的位置。一旦墨水凝固,凝胶就可以很容易地洗掉。这种方法克服了目前3D打印技术中遇到的两个难题。首先,解决了3D打印在挤压时需要较长时间才能凝固的问题。其次,由于其具有保持墨水持续液态的能力,先进的几何形状(例如具有高纵横比的悬垂结构形状或多种材料的精细组合)已成为一种设计可能。但早期的FL-3DP技术被认为功能还不完善,同时不能制造复杂的组件,只能制造单一材料结构或简单的形状,如壳和网格。尽管这项技术的前景很好,但缺乏更复杂的构建程序,经过研究,这部分可以通过调节油墨和支架之间的接口来实现,从而要求更高的打印分辨率。
△FL-3DP 3D打印技术,实现软性机器人功能组件的新方法。图片来自新加坡SUTD
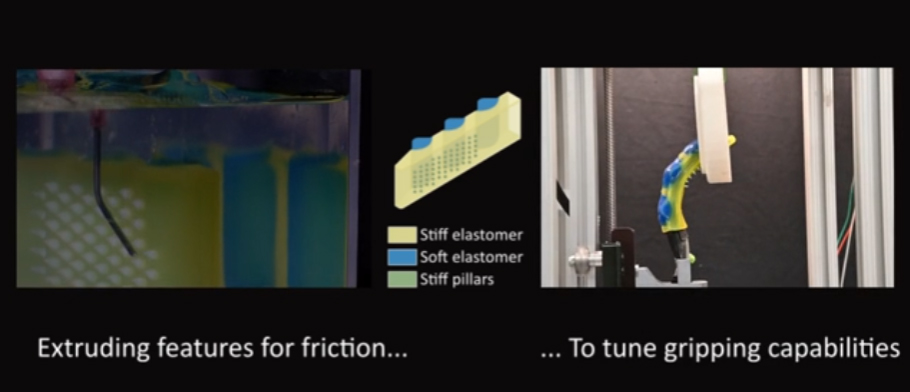
SUTD的科学家们通过深入研究支持凝胶和油墨之间的流变性能和界面稳定性,提高了打印分辨率和保真度。这一结果允许使用FL-3DP技术制造集成多种材料的复杂弹性体组件和改进更复杂的几何形状。该研究已在ACS Applied Materials & Interfaces期刊上发表。用于机器人的精密气动组件,用于机器人软性夹具。这是为了说明FL-3DP与传统制造方法(如成型和铸造)相比的优点。通过整合软、硬和功能性弹性体,研究人员能够准确控制部件的形状变形,通过固定软夹具表面的摩擦或提供传感功能来调整其功能,与传统铸造的同类产品相比,零部件的使用寿命提高了近10倍。
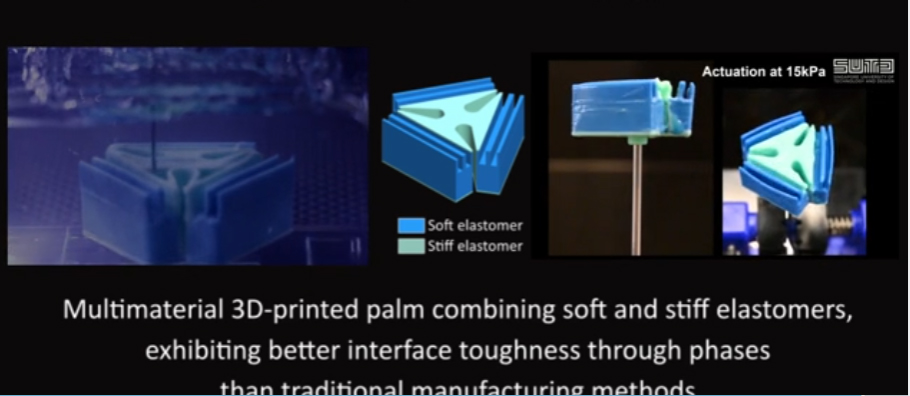
△多材料软性夹具3d打印结合柔软和坚硬的弹性体。图片来自新加坡SUTD
众所周知,获得的这些结果是全球科研人员共同努力的一部分,标志着基于挤压的3D打印进入新时代。改进后的方法为设计人员和工程人员提供了更广阔的设计空间,具有广阔的应用前景。新加坡科技设计大学研究首席研究员兼助理教授Pablo Valdivia y Alvarado补充道,:“FL-3DP 和其他基于挤压的新型增材制造工艺正在让我们越来越接近完全直接共制造复杂功能系统(例如机器人和其他复杂功能产品和设备)的最终目标。”
目前,该团队正在努力通过提出一种新的悬浮介质来扩大可加工材料的范围,这种悬浮介质在与更多的墨水兼容。
(责任编辑:admin)

 Xenia进军大幅面增材制造
Xenia进军大幅面增材制造 研究人员基于3D打印冰模板
研究人员基于3D打印冰模板 美国Brooks与惠普合作开发
美国Brooks与惠普合作开发 《AHM》:3D打印为患者定
《AHM》:3D打印为患者定 MB Therapeutics与Lynxter
MB Therapeutics与Lynxter 美国国防部正在使用3D打印
美国国防部正在使用3D打印最新内容
 美国空军引进3D砂
美国空军引进3D砂 3D打印个性化晶格
3D打印个性化晶格 伊犁州奎屯医院实
伊犁州奎屯医院实 昆士兰科技大学3D
昆士兰科技大学3D 全彩3D打印吉他在
全彩3D打印吉他在 PSAS成功发射3D打
PSAS成功发射3D打热点内容


