Adv. Mater������ѭ�������̻�3D��ӡ���������ʹ������������
ʱ�䣺2022-02-19 21:07 ��Դ��YiZ �ɷ������ʵ���� ���ߣ�admin �Ķ�����
3D��ӡ����Ϊ�������־����ṩ�˿��ܡ������̻�3D��ӡ������Vat Photopolyerization�����VP�����и߾��ȡ��߷ֱ��ʡ����ٳ��͵��ŵ㡣ͨ�������̻�������3D��ӡ�����˴��Կ������ϵĵ�����֬������ʵ���ʹ�����������˵Ŀ���������͡�Ȼ������ͨ�������̻�ƽ̨�ϣ����ʹ�����׳߶ȵĴ��Կ������ϣ����Կ��������֬���ʵĹ�������ɺܴ�ĸ��š����ʹ�������ϴ���׳߶ȴ��Կ������ϣ���Ȼ�Թ����ո��Ž�С�����Ǵ��Կ�������ٳ����������ײ����⽫���´��������ڴ�ӡ�����еķֲ������ȣ��������´�ӡ����ɡ���ˣ������ǰ���о�ֻʹ�����״��Կ�����Ϊ�������ϣ�ͬʱ���ֽϵ͵�������<1%) ��ȷ�����Ը��ϲ����ܹ����ͣ�Ȼ��������ϴ�ӡ���ͻ����˲��ܲ�����Ĵ������������ͽṹ���α䣬��Щ�����˴��ֻ��ʵ�ָ����ƶ���ͨ��Ҳ��Ҫ��Һ�廷���У�����Һ����������븡���������˶���������
���������һ�����͵�ѭ�������̻�3D��ӡ������Circulating Vat Photopolymerization, ���CVP)������������⡣CVP����ͨ�����̻�ƽ̨��������һ����֬ѭ��ϵͳ����ϵͳ�ڴ�ӡ�������ܲ��ϵضԴ��Ը��ϲ��Ͻ��л�ϣ��Ӷ���֤��������֬�еľ��ȷֲ������ķ��ֲ������˴��Կ����IJ��Ϻͳߴ�Թ�̻�3D��ӡ���̵�Ӱ�죬��֤���������壨SrFe12O19�����Կ�����Ϊ�������ϵ���Խ�ԣ�����Ϊ���������ڴ�����֬�������ɸߴ�30%��ͨ��ʹ��CVP������չʾ�˸���һ�γ��͵�˨ϵ�ͷ�˨ϵ�ʹ�������������Լ���ͨ��3D�α����Һ�ε�������ͨ���������Զ�������ʵ�ֲ�ͬ�Ĵ������������ͨ���������ɹ���չʾ�����̼��ùϩ�������ҩ�Եļ�⣬����Ŀǰ�������͵Ĵ������������������ʵ�ֵġ�
CVP�ĸ�����֬ѭ��ϵͳ�����Ƶ���֬�ۡ�ѭ���á������������Լ������õ�������ɣ�ͼ1a�����ڴ�ӡ�Ĺ����У�ѭ���ò��ϵؽ���֬�۵ײ��Ĵ��Ը�����֬���뵽�����������У������Ϻ�õ��Ĵ��Ը�����֬�ٴα�������֬���У��Ӷ�ȷ�������ľ����ԡ�CVP����ӡ����Ʒ�ڴ�ӡ������û����ʾ�����Ե���ɫ�仯���dz������ر������Կ������ϵľ��ȷֲ�����CVP�෴��VP����Ʒ���Ŵ�ӡ�Ľ��У���ɫ�䵭ֱ��������������Ϊ��ӡ�����п������������µģ�ͼ1b������Ʒ�Ķ�������ʾ��ͼҲ���������Ը�����֬������δ�Դ��Կ������ϵķֲ��ʹ�ӡ�������Ӱ�죨ͼ1b����ͬʱ����VP��Ʒ��ȣ�CVP��Ʒ�е��ܶȷֲ���ͼ1c�����һ�£�����Fe�����ȣ�Sr��Ԫ�صķֲ�����������������û�����ԵĿն���ͼ1d������Щ��һ������CVP����Ч�ر��ָ��ϲ��ϵĸ����ʶȡ�
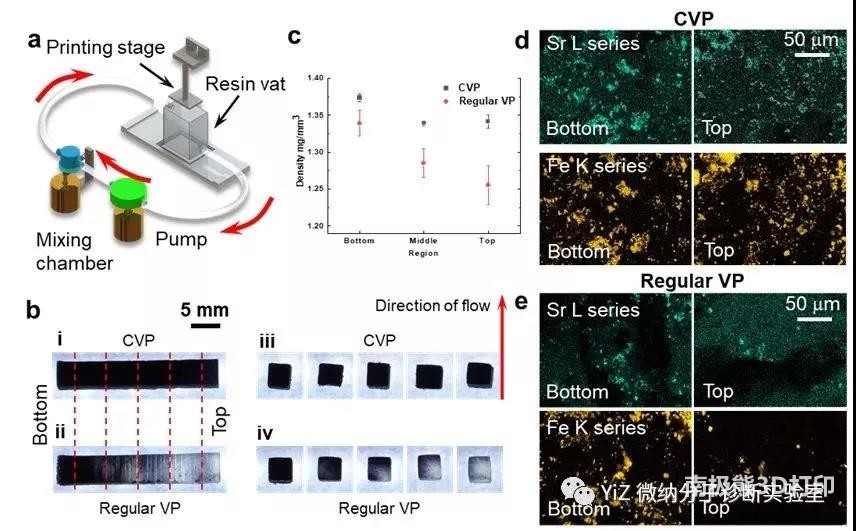
ͼ1��ѭ�������̻���CVP��3D��ӡ������a) ��֬ѭ��ϵͳʾ��ͼ��b)
��ͨѭ�������̻���VP����CVP��ӡ����Ʒ�Աȣ�Bottom�����ⲿ�����ȴ�ӡ��Top�����ⲿ������ӡ��iii & iv �ֱ���i
& ii �����߲��ֵĺ���棻c) b ����Ʒ��ͬ��λ���ܶȶԱȣ�d) b����ƷBottom �� Top
��λ����Ԫ�أ�Fe������Ԫ�أ�Sr���ķֲ��Աȡ�
���Կ������ϵij���ЧӦ��Թ��ӵ������ʼ����������Ŀǰ��ͨ��̻���ӡ���Ը��ϲ��ϵ��������������϶Թ��ӵ�����ʹ����֬���ܵõ��㹻���������й̻��������ij�����ᵼ�´��Կ��������ڸ��ϲ����еķֲ������������о������ֳ��õĴ��Կ������ϨC��������Fe3O4���������NdFeB�����������壨SrFe12O19�� �C�Դ�ӡ���̵�Ӱ�졣���������ϵ����չ���ͼ��ʾ��ͼ2a������ͬ���������Ƴߴ������£���������Թ��ӵ������������������������������ڴ��Ը�����֬�б��ָߵ����������Կ����Ĵ�СҲ������Ҫ�����ӵ��������������ſ������������������С��ͼ2b����Ȼ��������������Խ��Խ������Խ������������ٶ�Ҳ��Խ�죨ͼ2c�����ۺϹ�������������ԣ�3-6������������Կ�������Թ��ӱȽ������������������еij������ʣ���ѡ��Ϊ���ʺ�������ӡ���Ը��ϲ��ϵ����ϡ���֬���������ϲ��ɱ���Ļ����֬���������Բ���Ӱ�죬�����������������ӣ����Ը�����֬���ֳ����Եļ���ϡ������ͼ2d��ͼ2e����Ȼ������Ӱ��dz�С��������Ӱ��CVP�Ĵ�ӡ���̡�CVP��ӡ�ĸ��ϲ��������������������ӻ�еǿ�����٣���Ӧ������ģ��Ҳ��С��ͼ2f��ͼ2g������������CVP�еĴ������ϲ�δ����֬������ѧ����ϣ���������ֻ�ǿռ��ϱ���������֬�γɵ������У�����������ռ�ݵĿռ併������֮֬������ӣ��Ӷ������˻�еǿ�ȡ���һ���������ڴ�����������˵����졣�������ϵ�����ͬʱʹ�ô��Ը��ϲ��Ͼ߱����Ա����ôŻ������ԣ����������Ĵ��ͻ���Ҳ��ʾ��ͼ2h����������������CVP�Ĵ��Ը��ϲ���չ�ֳ�Խ��Խ�ߵ�ʣ��Ż�ǿ�ȣ����Ըò���ΪӲ�Ų��ϡ�CVP�ǻ��ڴ�ͳ�Ĺ�̻���ӡ������������Էdz����ٵء����ز��������е���ҵ��ӡ���У����Ҳ���Ӱ���ӡ���ľ��ȣ�����������ӡ�dz����ӵ��ͽṹ�ҿ����ڴų������²���������α䣨ͼ2 i~k����������չ�ֵ�3D��ӡ���Ը��ϲ���չ�ֳ��dz����õĵ�����Ż����ԣ���ӡ�Ľṹ�����Ϳ��Ա��ų�����������dz��ʺ�����������������������ˡ�
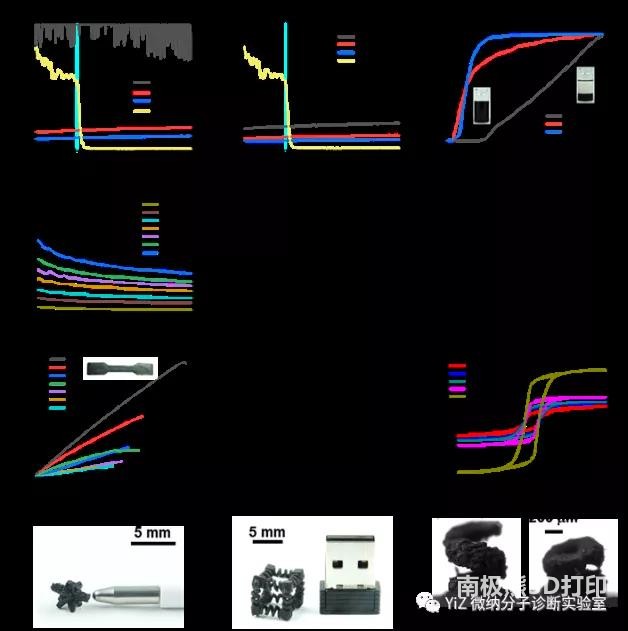
ͼ2��CVP�����Է���: a)
����ߴ���������壨SrFe12O19������������Fe3O4���������NdFeB�����������չ��ף�b)��ͬ�ߴ��������壨SrFe12O19�����������չ��ף�c)��ͬ�ߴ��������壨SrFe12O19����������֬�е��½����ʣ�d)������֬�ڲ�ͬ���������µ�ճ��;e)600~900
s-1��ƽ���������ʣ�f)��ͬ���Կ���������Ʒ��CVP����Ӧ��Ӧ��ͼ��g)��ͬ���Կ���������Ʒ��CVP��������ģ����h)��ͬ���Կ���������Ʒ��CVP���Ĵ��ͻ��ߣ�i-k)
CVP��ӡ���ͽṹ��k) ���Ե��ɵ��߾�Ϊ300�ף��⾶Ϊ900�ס�
������ʾ����CVP����ļ����������Һ�β��ݵ�˨ϵ�ͷ�˨ϵ�ʹ�����������ˡ���չʾ�Ļ����˾�һ����������Ҵ��Կ���������(15%)�������Ĵ�ӡʱ����5~30�������ң������Ƴ���ӡ�����е�֧�Žṹ��������Ҫ�����ճ�ӡ��и����װ���衣���ʵ����ⲿ�ų������£���������ʵ�ָ����ƶ�����������ɿ����α䣬ʵ��4D��ӡ�����ɱ�3D��ӡ����
�ʹ��������еצ��צ�Ӳ��������Ϊ�������ṹ��ͼ3a����������������еצ�ײ���ʱ��צ�ӱ�������������ʱצ���ſ���������������ʱ��צ�������ĵ��Խ�ʹצ�Ӹ�λ����ʱצ�Ӵ��ڹر�״̬����ͳ�Ļ�еצ������ץȡ������Ʒ��Ȼ�������ĵĻ�еצ���渲����һ�㳬��ˮͿ��ʱ����еצ������������ץȡ������Ʒ��ͼ3d��������Ҫ���ǿ�������ץȡҺ�Σ�ͼ3b�������⣬�û�еצ�����������ں�liquid marble. Liquid marble ����Һ�εı��渲����һ���ɳ���ˮ�����γɵ�Ĥ���������Ĥ�Ĵ��ڣ�ʹ��liquid marble֮����ںϷdz����ѡ�Ŀǰ�������ǽ�����liquid marble��һ���ĽǶȸ�����ײ�����ַ����dz��������ƣ�liquid marble�������൯������һ�ַ�����ʹ�ø�ѹ�����õ�ɵ��������ʹliquid marble���ںϣ���������Ҫ��ǧ���ĵ�ѹ����������ȫ�¹ʡ����ĵĻ�еצ����ͬʱץ������liquid marble��ͨ����ѹ�ķ�ʽ�����ںϣ�ͼ3c�����dz��ļ�Ч���û�еצ����ϽǶ�Ϊ35�㣬�����ٶ�Ϊ8.4��/s��ÿ��צ�ӿ����ṩԼ4.7mN����������ץ��3~50����Һ�κ�0.958g�Ĺ�����Ʒ������1��ο��Ϻ���������������
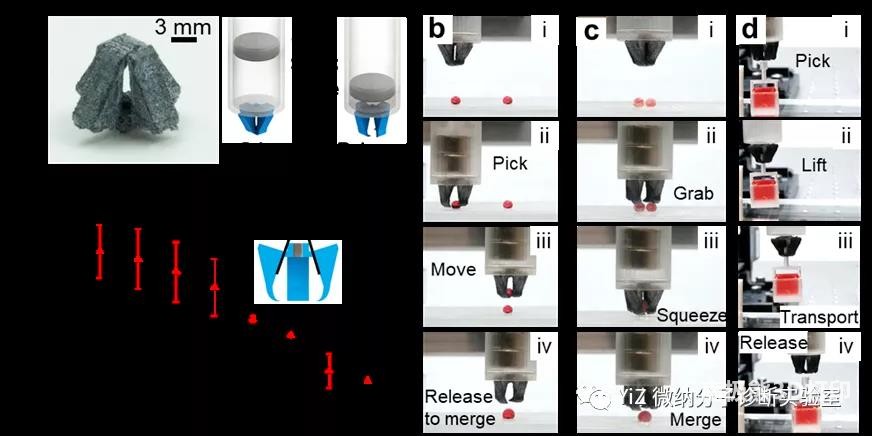
ͼ3�����������еצ��a����еצ�Ĺ���ԭ����b����еצץȡ���ƶ�Һ�Σ�c)��еצͬʱץ������marble,ͨ����ѹʹ֮�ںϣ�d����еצץȡ��ͨ�����塣
�ʹ�������ëë���ľ��������������ͬ���˶�ԭ������ëë�������Ϊ����ͼ4c��������������ëë��ĵײ�ʱ����ʩ��һ��ָ����������ǿ����FT��FTˮƽ����ķ�����β������ͷ��ʹ�õ��ɽṹѹ����ͬʱ��ͷ����Ϊ��ֱ�����ǿ�����������㹻��ľ�Ħ����ʹ��ͷ�����ֲ������������������Ƴ�ʱ�����ɽṹ��ʼ�ͷŵ������ܣ�ͷ����β��ͬʱ�ܵ����ɵ�����������β�ͱ�ͷ����������Ӵ�����������Ħ����Ҳ��������β�ͱ��ֲ��������ɵ������˷�ͷ�������Ħ����ʹ����ǰ�ƶ���ͨ�������ظ������������ʵ�ֻ�������ǰ�ƶ��������������˵ı���Ҳ��������һ�㳬��ˮͿ�㣬ʹ�����ǿ��Ա�������ָ����·�����ƶ�Һ��ǰ����ëë�������ֻ�����ƶ�һ��Һ�Σ�ͼ4d������ľ�������˿���ͬʱ�ƶ�����Һ�Σ������Ľӽ���Զ����Էֱ�ʹ��ľ���ĺ�����ǰ���߶�һ��Һ�Ρ����ëë������˵�β�����̶�ס��������������6.6m/s���ٶȽ�Һ�ε����ȥ��ͼ4e����ëë������˵�ƽ������Ϊ2.86mm��20.4% ���������ȣ�ͼ4g����ľ�������˵�ƽ������Ϊ2.81mm ��28.1%���������ȣ�ͼ4h�������������Ʊ��Ĵ�����������˵IJ�����Լ����15~29%���������ȣ����֮�£�ëë���ľ���������Ƿdz������Ƶġ�����ëë���β����ľ�������˵ĺ��Ȼ������ĺ��������Ⲣ��Ӱ�������ǰ��������
(���α༭��admin)

��һƪ���Ϻ�������ѧ���������帨��3D��ӡ���������������
��һƪ����ʢ��������ѧ��3D��ӡ������ά��ǿ���ϲ��ϣ������������������
��һƪ����ʢ��������ѧ��3D��ӡ������ά��ǿ���ϲ��ϣ������������������
 Xenia�����������������
Xenia����������������� �о���Ա����3D��ӡ��ģ��
�о���Ա����3D��ӡ��ģ�� ����Brooks����պ�������
����Brooks����պ������� ��AHM����3D��ӡΪ���߶�
��AHM����3D��ӡΪ���߶� MB Therapeutics��Lynxter
MB Therapeutics��Lynxter ��������������ʹ��3D��ӡ
��������������ʹ��3D��ӡ��������
- ��Xenia������������������г���ƾ���
- ���о���Ա����3D��ӡ��ģ�忪����������
- ������Brooks����պ������������ܾ���3D
- ����AHM����3D��ӡΪ���߶��ơ�һ��һ��
- ��MB Therapeutics��Lynxter�������Ƴ���
- ����������������ʹ��3D��ӡ����߳�����
- ��HYP3D��Ŀ�����մ�3D��ӡ������ѹ����
- ���Ĵ����������������ƶ�iLAuNCH��Ŀ��
- ��Restor3dʹ��Formlabs 3D��ӡ��������
- ������3D��ӡˮ�����������������˿�
 �����վ�����3Dɰ
�����վ�����3Dɰ 3D��ӡ���Ի�����
3D��ӡ���Ի����� �����ݿ���ҽԺʵ
�����ݿ���ҽԺʵ ��ʿ���Ƽ���ѧ3D
��ʿ���Ƽ���ѧ3D ȫ��3D��ӡ������
ȫ��3D��ӡ������ PSAS�ɹ�����3D��
PSAS�ɹ�����3D���ȵ�����
- ��HueForge����������ʹ��3D��ӡ��������
- ��15��3D��ӡ��������Ӧ�ð���
- ������ܽ2021���й����պ�������3D��
- ��ģ��3D��ӡ����ӥ����ģ��������һ�廯
- ������ʿ��3D��ӡ���������ް̺۵Ķ�����
- ������Brooks����պ������������ܾ���3D
- ����������ѧ�����صĶ��3D��ӡֲ������
- ��̼�к��´��⣺�ó��л��յķ����ϣ���
- ���ؽ����߸���������3D��ӡ��ϥ�ؽ���
- �����ӻ���FDM��ӡ���������о���Ա����


