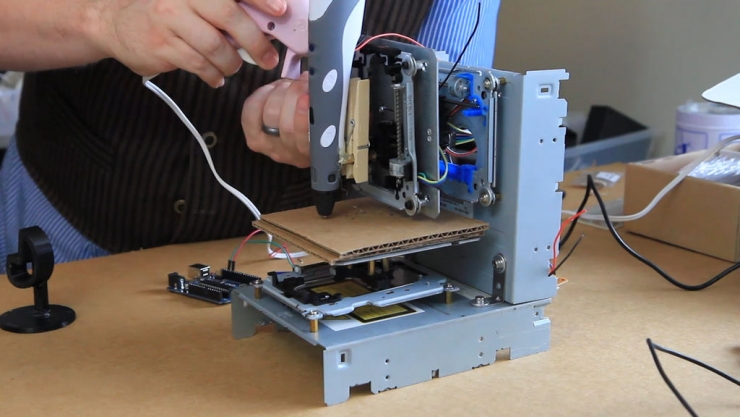
��DVD������û���ˣ�DIYһ���ײ˼۵�3D��ӡ����
���������ʵҲ�Ǵ�Instructables�ϵ����ģ�֮ǰ������վ�Ͽ�����һ��������CD������һ�����ػ�������Щ������Ʒ�ڴ������ﶼ�����˵ڶ�����ʲô�滭�����ˣ������и�����괲�ȵȣ������һ���ʱû����������3d��ӡ��������û�����۰�ġ������Ҿ��þɵ�DVD������������һ̨�ײ˼۵�3D��ӡ���������Ҳ����Ȥ������һ�����ɡ�
��һ������ϲ���������Ľ̳̣��ǾͿ���Ƶ�ɡ�
������Ǹ��Ӿ������ϲ�����߳������ֽ̳̣���ô����ֱ�ӹۿ��������Ƶ�̳̣�
�ڶ��������㲿��
���������Ŀ��ʵҲ��Ϊ�˷��������ã��Ͼ������ϵ������������������þ��˷ѵ��ˡ�����3D��ӡ�ʣ������Ķ��ǵ�Ͼɲ���������Ҳ�����ҵ������¾���������Ҫ���㲿���嵥��
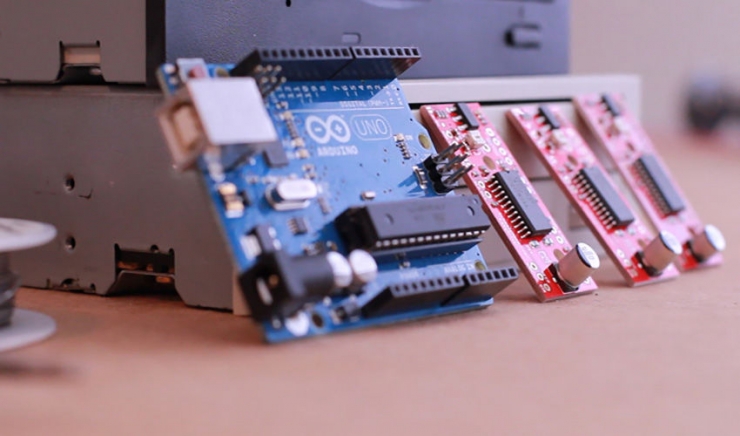
1. 3��DVD��������
2. 3�����������������Ҳ�ܱ��ˣ�6��Ԫ���ѣ���
3. PC��Դ��
4. Arduino Uno�����壨10��Ԫ����
5. 3D��ӡ�ʣ�45��Ԫ����
6. ��˿����ĸ���ɡ�
7. 2�������ǣ����DZ��룬�����������������棩��
8. �����ͺ��ϡ�
9. ���۽���
�ܻ��ѣ�55��Ԫ���ң��Dz��Ǻܱ��ˣ���





���������������
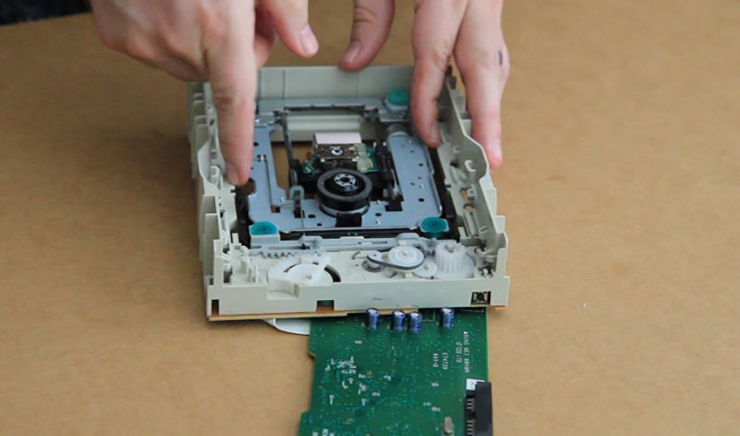
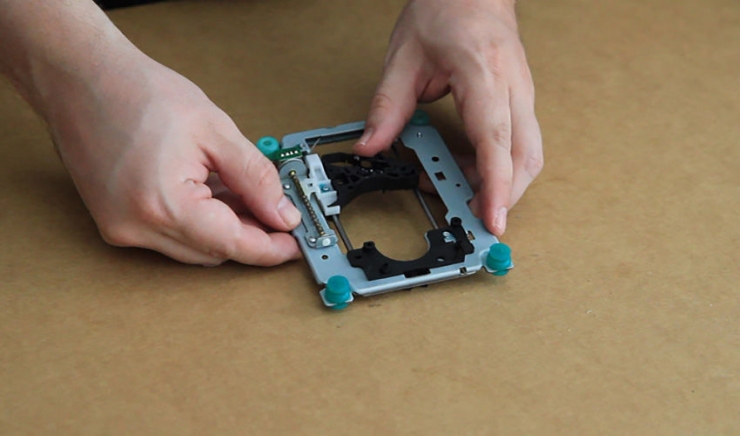
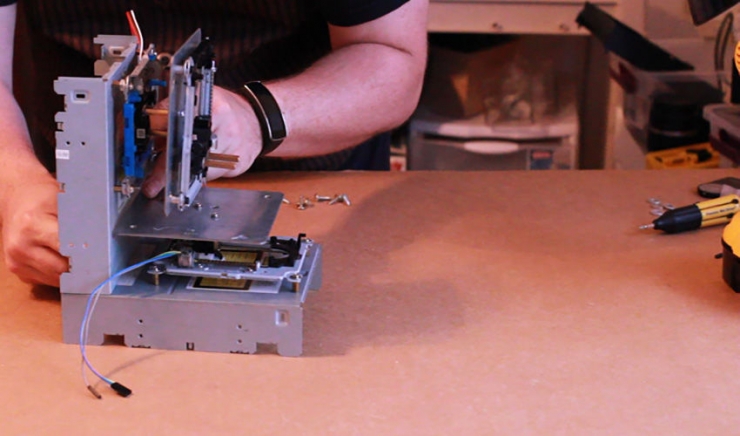
���������ʵ�ܼ������������Ǻ��ӵ�һЩ���⣬��һ�����Dz������������ǰ��塣��ʵ�м��и�С���ɣ���ֻ���ø��������������ͺá��������̺�ǰ�����۶ϡ��㶨����Ϳ���ж�¹����ϵ���˿��ȡ������������ϵ�����ˡ�


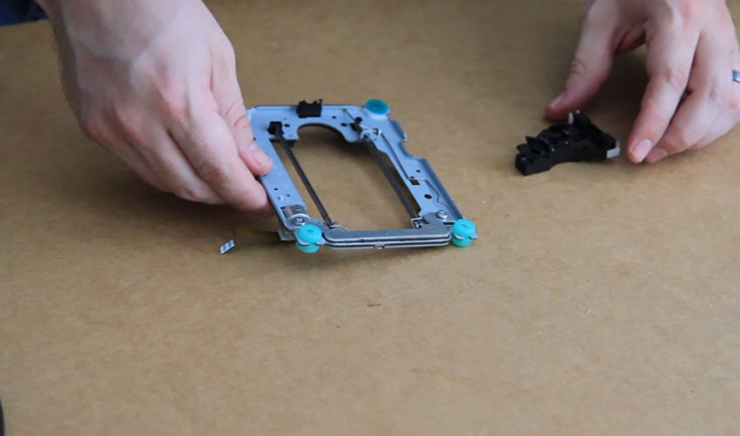
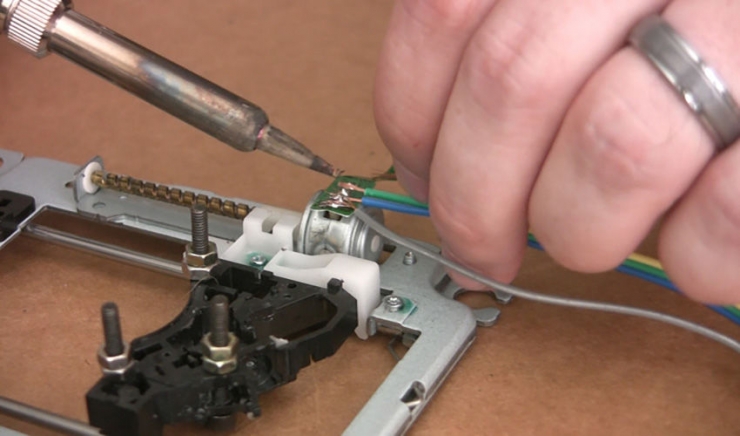
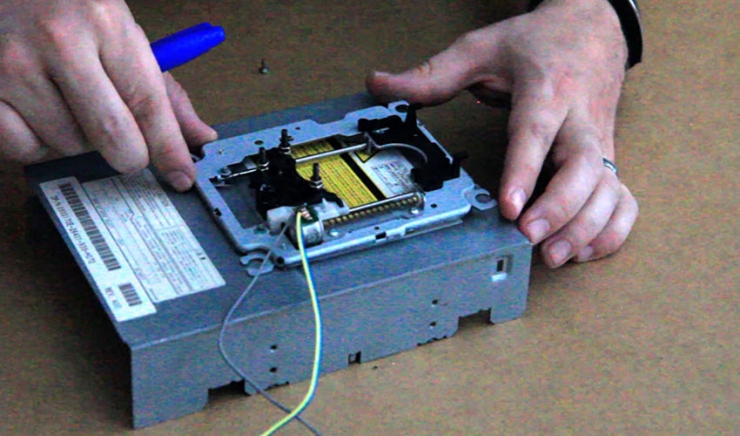
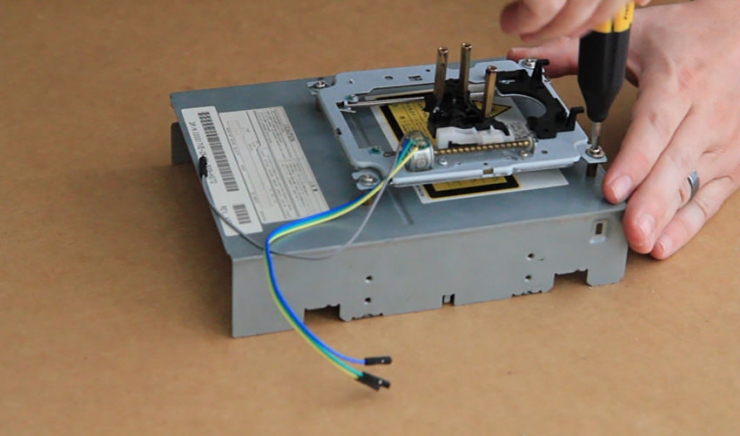
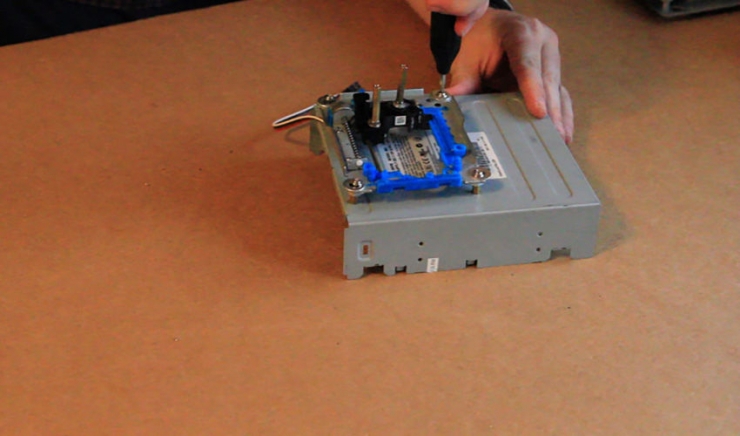
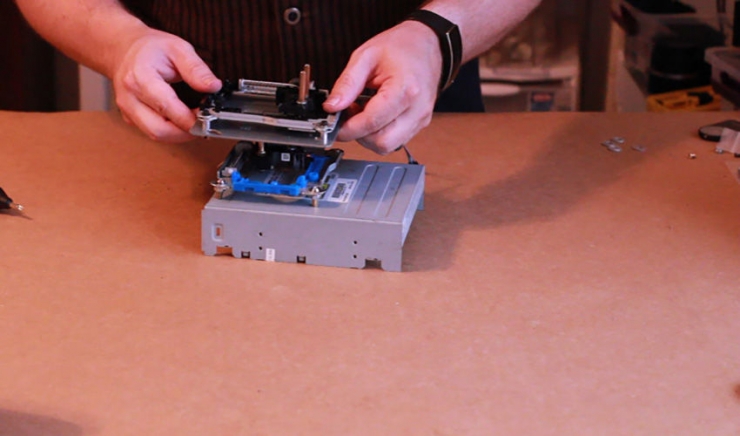
��������ܿ��������������㲿���ˣ����������������LED�ƺʹ���װ�õȵȡ�������ʵ�кܶ����õ�����������������Ŀ�У�������Ҫ�õ����ǿ���в�������Ľ����綯���̣��������ݸ˵��Dz��֣��ͼ��ⰲȫ�֡�������Ҫ��Щ�㲿������Ϊ�����ܸ������ṩ����������ǣ��������Ǿ�������һ�������������ᡣ�ðɣ�������Ҫ�Ͽ���Щ�㲿��֮�������Ȼ�����Dz�������������㻹���Խ������ϵ���ˢֱ���������������Ȼ�������ò����������������˻�����������Ҫ���㲿�����������¼���������������������ͷ�ȡ����⣬���ӳ����������ϵ��߲��Ա����á��ڶ����IJ������������Ƕ��ܿ���һ�������������ϵĴ�״���£�����������Է��ļ�������������ڽӿ��ն��Ϻ���4�����ߣ�����6�� ������Ϊ�˷�ֹ�Ժ�Ū�죬�һ�Ϊ��Щ�߱����롣�㶨��������������������Ϳ��Խ�����һ���ˡ�
���IJ�����װ�綯����
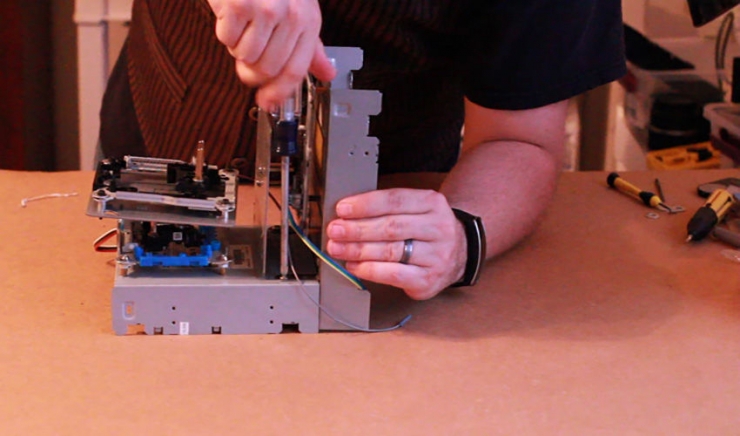
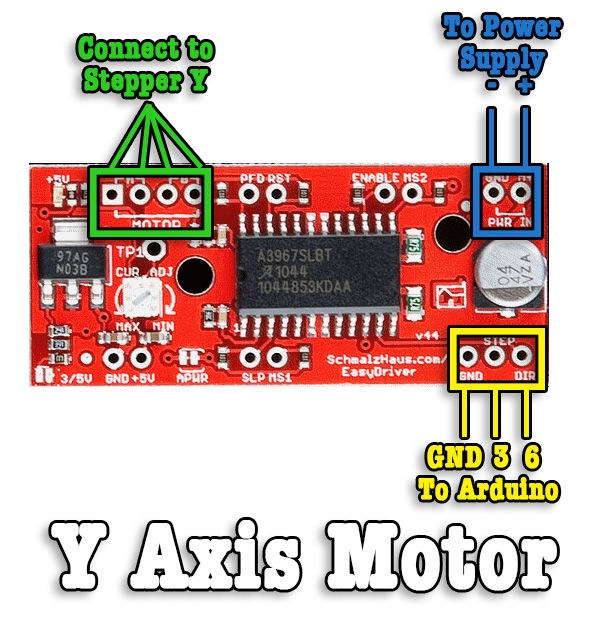
Ϊ�˸��綯�����Ҹ�����֮�������������˹����С��ðɣ��������Ǿ��ȴ�Y�Ὺʼ�ɣ�Y����Ҫ����ǰ���ͺ��˵Ķ�����������ͼ�뽫һ���綯����ƽ�еİ�װ�ڹ������ϣ��ں�λ�ú�ȷ���䳯��Ƕ��Ƿ���ȷ��Ȼ������������˿����̶��á�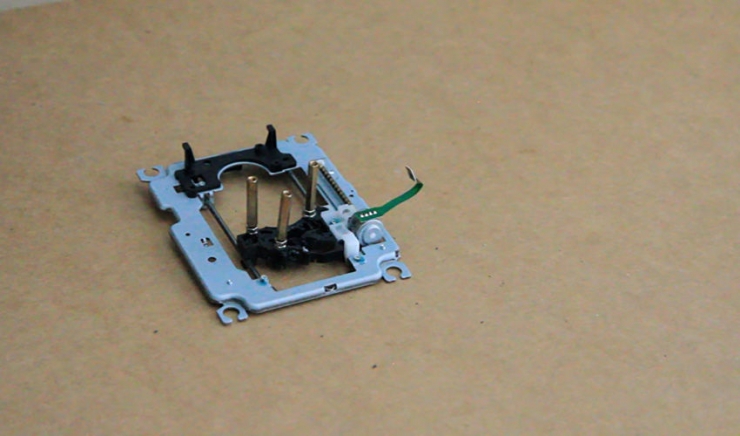
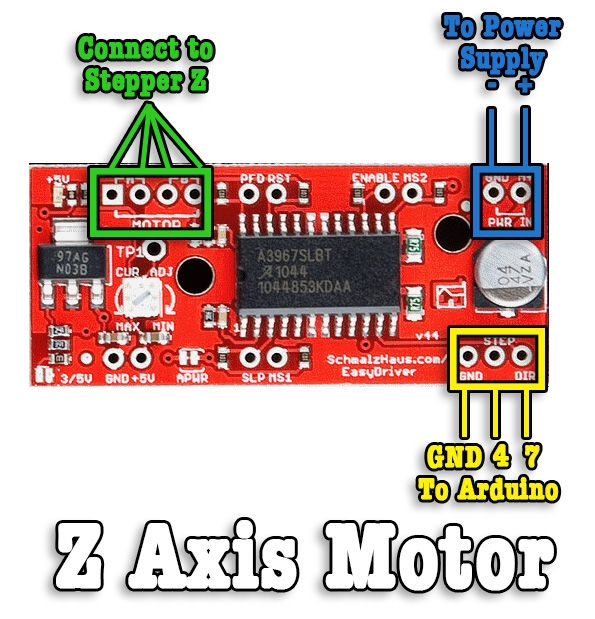
X���������������Y���෴����Ҫ�����������Dz��ִ�ֱ����������ɲο�Y��İ�װ���㶨��X���Y�ᣬ���ǾͿ�������Z���ˣ�Z����Ҫ��װ�ڼ��ⰲȫ���ϣ�X�ᣩ���������ǵ���Щ���Ϊ��������װƽ̨������������������˿֧����һ�������ǰ���Ϊ��װƽ̨�����⣬��Y������Ҳ�編����������һ����װƽ̨��
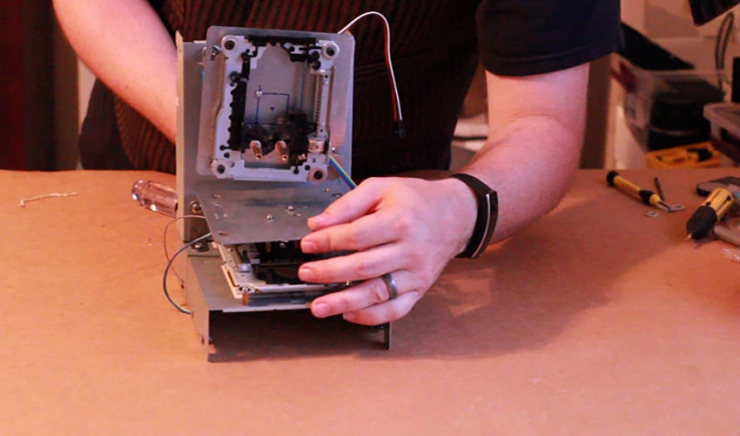
���岽������֧��
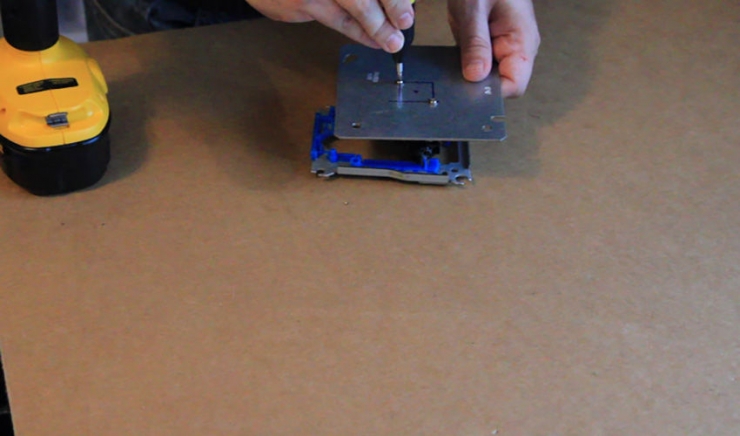
�ֱ�㶨��X��Y��Z����������Ҫ������װ�ˣ���������Ҫ��X��Z�ᰲװ��Y���ϡ���װʱX��Ҫ��Y�ᴹֱ������������ĸL�������������������Z���X����롣�����������ֽ�����������֤���Ƕ����������ײ��У��������ɺͿ�������˿�����ǹ̶�ס�ˡ��������һ����˸�L��֧�����ӹ̣�������ʵ��˿��ǿ��Ӧ�þ��㹻�ˡ�
������������
��Ҫ�����Ƕ����������ǵð����ߺã���������Ҫ��5���㲿����
-
1��Arduino������
-
3���������������
-
1��PC��Դ
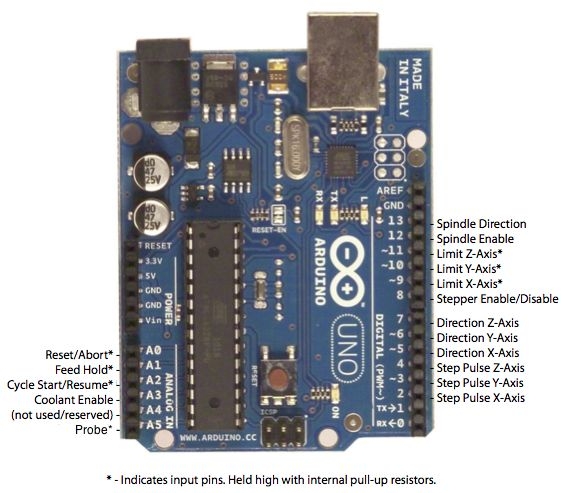
������Щ���㻹�ö������߲ĺ����������ϵȡ����ں��ӵȹ���������Բο����������еĸ����ʾ��ͼ�������������������������ӽӿں����ŵ������¡����������ǿ�ʼ��һ�������ɡ�
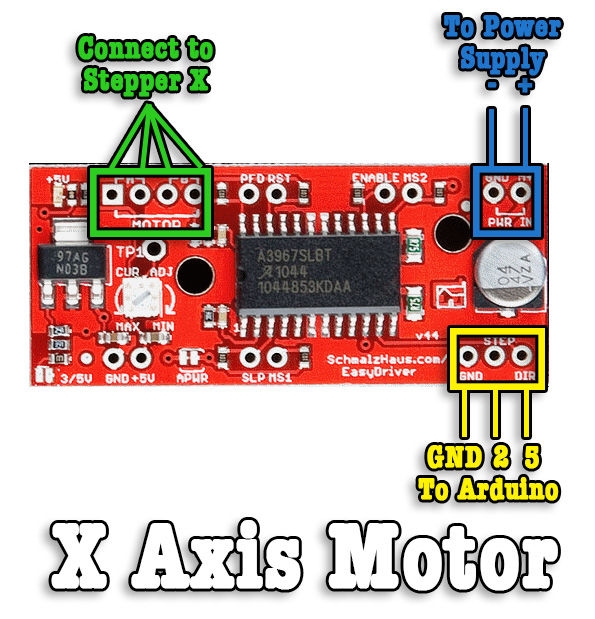
Arduino Uno���������Ŀ�Ĵ��ԣ���������������в�����������Ҳ�������ܵģ��ڿ��Ʋ�������Ͼͳ��˵����⣬��Ҫ�������������Ҫ�����������������������ο�ͼ�н�������������������Arduino������͵�Դ��������
�ڵ�Դ�ⲿ������Ҫ�Լ�ע�⣬��Ϊ������ʽ��Դ����ʵ�ڹ��ڸ��ӣ�����Һõ����ĸ��߿���������ʵĵ�ѹ��
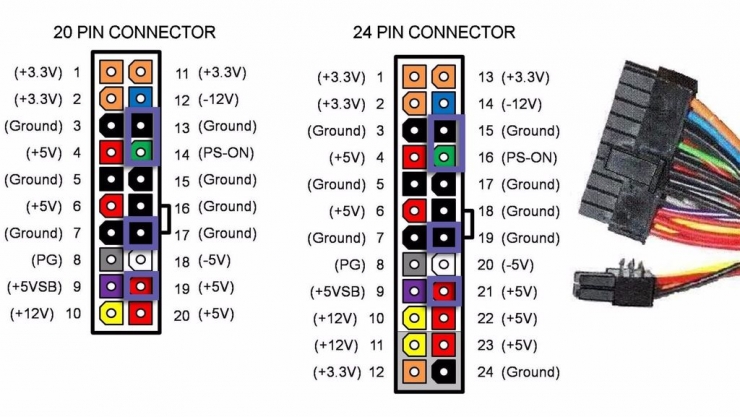
���������õ�����ɫ�����ߣ����������û�н���ȷ������������Դ�����ǿ�����һ�������������ߣ������ߺͺ�ɫ�ĵ�������������Ҫ���������������������ý�һ��5V�ĺ��ߺں�ɫ�ĵ���������������һ����ʵͦ�鷳����ý����Ƿֳ������ֱ����ӵ�3����������������ϣ��ɲο���ͼ����
���߲�������3D��ӡ��
3D��ӡ���Ϲ����������ư�ť�����ǿ��Կ��ƴ�ӡ��Ʒ�ĺ�Ⱥʹ�ӡ�ʵ�����ѹ����ѹ������ӡ���ϣ���һϵ�ж�������������Ҫ��������ѹ�Ŀ��ƣ��ð�ť���Խ���ӡ���ϼ���������Ҳ�ǽ���3D��ӡ�Ĺؼ���
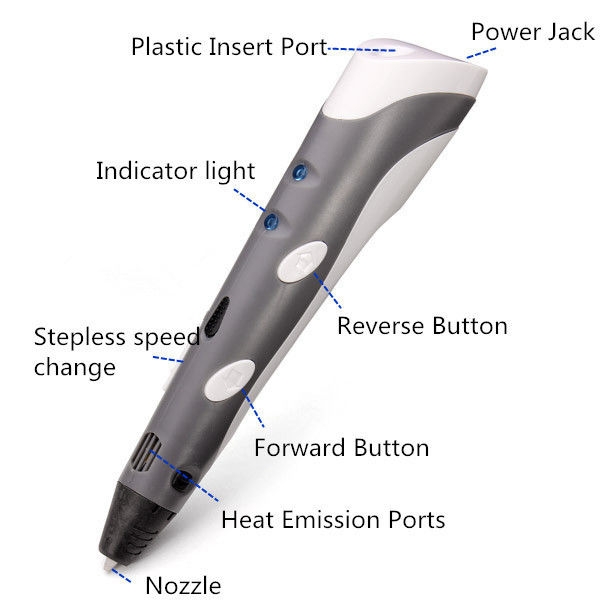
�ֶ����ƿ϶�û�е��Կ��ƾ�ȷ����������Ҫ��3D��ӡ�ʵĵ�·���и��죬�������ǾͿ�����Arduino������о�ȷ�����ˡ��������Ҫ��3D��ӡ�ʲ��㶨��������ѹ�İ�ť�������Dz�����ϸ���裺
-
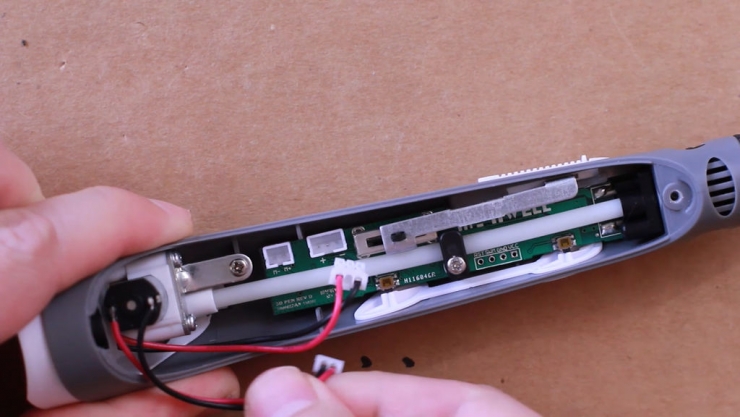
ж����˿�������ӡ�ʵĺ�ǡ�
-
�Ͽ���Դ�ߡ�
-
ж���ϲ��Ĺ̶���˿�����µ�Դ�ӿڡ�
-
���»�����ť������ж�¡�
-
ж�»�����ť�Ľ�������
-
ж��˿��֧���ϵ���˿��
-
̧��˿�ܺ����岢����ж�¡�
-
������졣
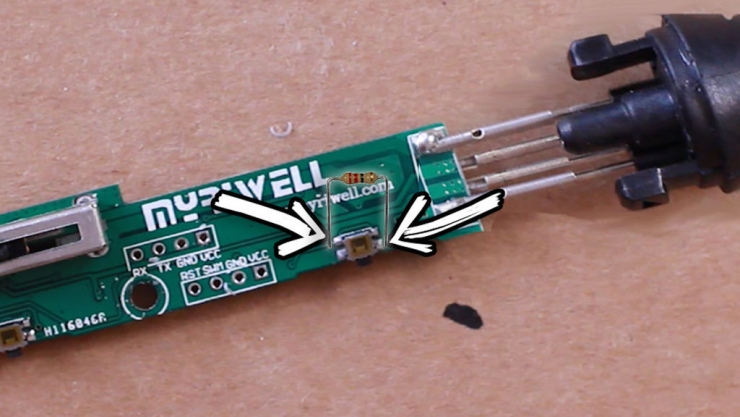
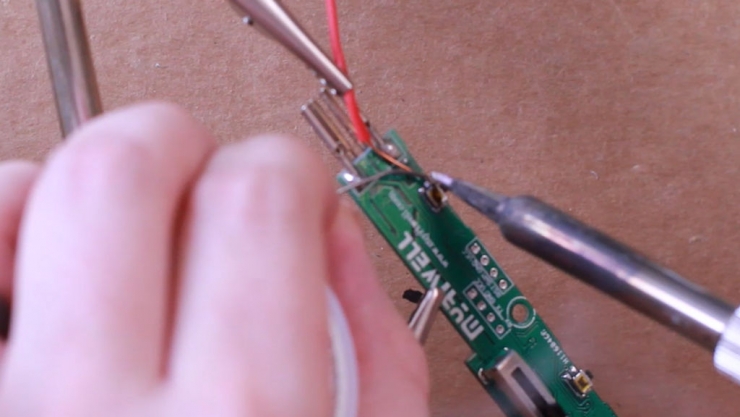

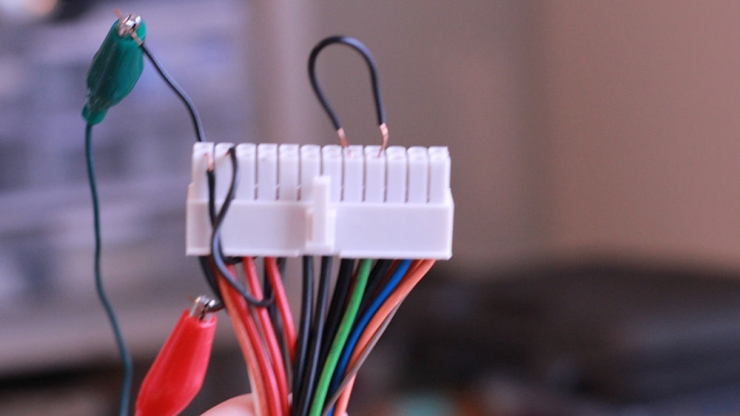
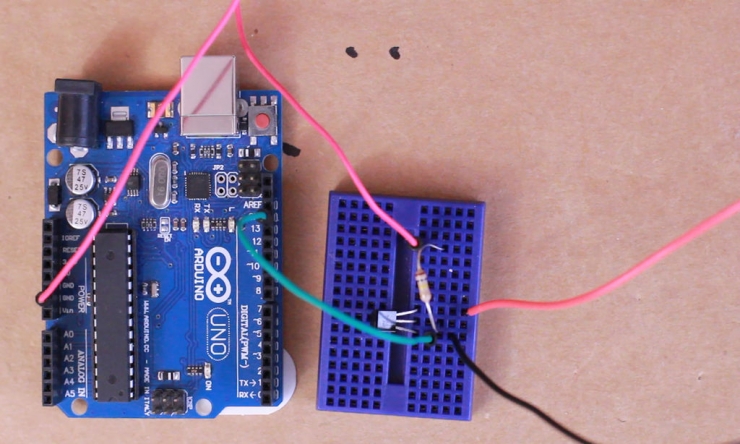
�����ӡ�ʺͿ��Կ�����������ѹ�İ�ť�ˣ������ĸ����Ϸֱ����ĸ��ӿڡ��������Ҫ�ֱ���в��ԣ������������ӿڿ���˳�����Ƶ���������ڽ��в���֮ǰ�����ǻ����ٽ�����͵�Դ�ӿ���������Ҫ��Ȼ3D��ӡ�ʾ��������ˡ������Ȱ�ť����֮��һ��1k ohm��������һ�˴���һ���ӿ��ϣ���һ�˴�����һ���ϡ��Դ˷����ֱ�����ĸ��ӿڣ���������ѹ�����ʼ��ת�����Ǿͳɹ��ˡ��ҵ��������ԵĽӿں�����Ҫ��һ���߽������������������ں���ʱҪע�⣬��Ϊ��ʵ����̫С�ˣ������Ϲ����Ӱ��δ���Ĺ�����
�ڽ���ӡ�ʻ�ԭ֮ǰ������1k Ohm�ĵ�����������в��ԣ���ȷ�����������������Һ�����ȱ�����������۽������Ӹ�˫���գ����Ϳ������½���ӡ����װ�����ˡ��ǵ��õ�Ƭ���ߵ����ں���Ͽ�һ�������������ռ䡣
�ڰ˲�������һ�����ص�·
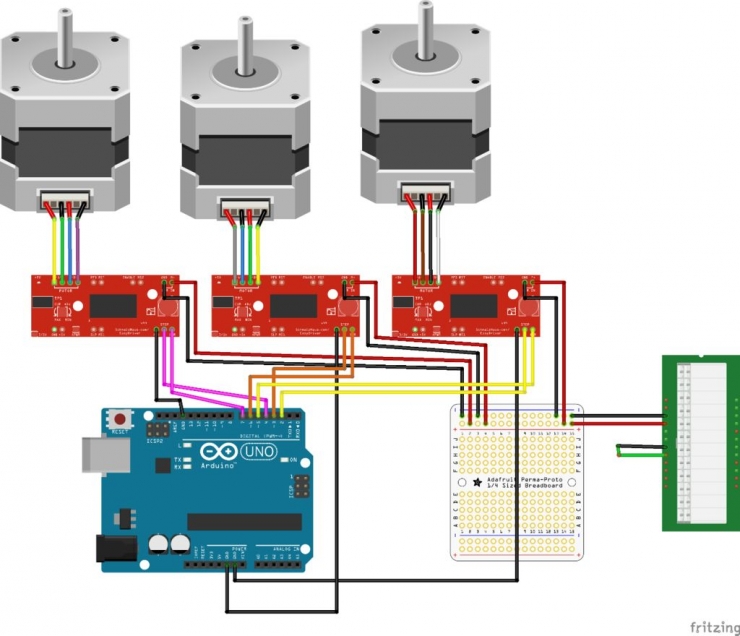
�����������еĵ�·ͼ��
��һ������������·�ˣ�ͨ������������Arduino��������ѹ��ť�������·�ĺ����Ǿ���ܣ����������Dz��ܶԵ����źŽ��зŴ�Ϳ��أ����еĿ��ع��ܸ���������������ġ�
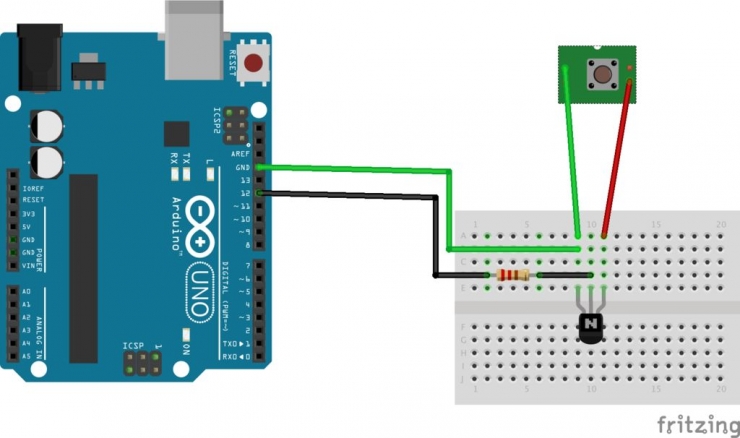
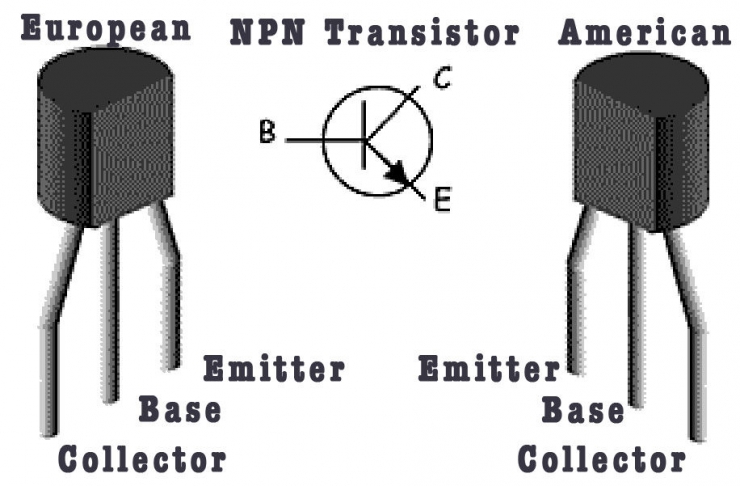
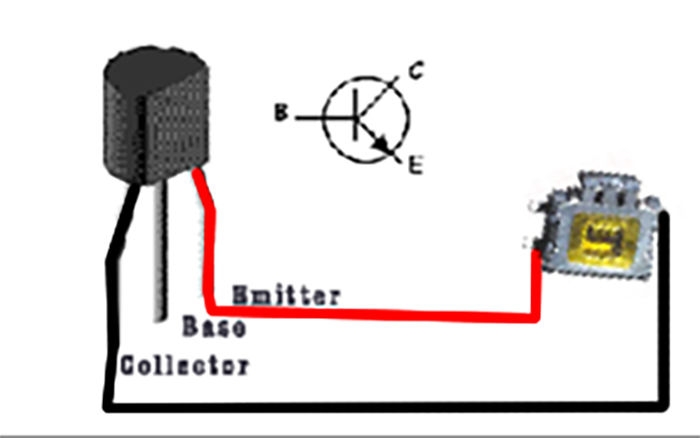
���еľ���ܶ���3�����ţ������������������ͷ���������������ܵ����Ͳ�ͬ�������ŵ��Ų���ʽҲ��ͬ��������֮ǰ��������һ�¶���Ϊ�á������������Ű��ݵĽ�ɫ���뽫һ����ť�����ڼ������ϣ���һ�����ڷ������ϣ����ߵ������ϲ��þ��ᣬ��ô�������ԡ��������Ҫ��Arduino������;���������������Ƚ����߽��ϼ����������Arduino��12���������ϻ������������ǵĿ��ؾͿ�����ˡ��ǵ���12�����źͻ������һ��������������ѡ������ʱҪ��˵���ӡ�ʣ���һ�����Ҿͻ��������θ��ݴ�ӡ��ѡ����ʵĵ�������
�ھŲ�������ȷ�������ĸ��ǿ������������ĵ����أ�
����ֵ�Ա�֤3D��ӡ�ʺ;���ܵ��������к���Ҫ����ѡ�����ʵĵ�������Բο����漸�����顣���ȣ�����ӡ�����ϼ������ͷ����������Arduino�ĵ��߽ӿ����ϼ�������֮�����ǾͿ��Կ�ʼ�����ˣ���ǧ��Ҫ��Arduino����ӡ�ʿ����������߽�������Arduino�ĵ��߽ӿ�����������������ܴ�ӡ�ʵĿ��أ���˵������ֵ��Щ�͡���ʱ���Ǿ�Ҫ���ӵ��衣��ʼʱ��ʹ��1k Ohm�ĵ��裬������оͻ���10k Ohm�ģ����������Ȼ����ͼ������ӵ���ֵ��ֱ�����ز����Զ���

���Խ��������Ǿ��ܸ���ӵ���ʱ��Ҫ�������ˣ���һ�����ǻ�Ҫ����ͨ�磬�ҳ���ʱ�����������ֹ���ش����ող��Ժõĵ�������Arduino��5V�ӿ��ϣ�Ȼ���Arduino���������δ�ܿ�����˵����ʱ������Щ�ߣ���������Ҫһ������С���衣�����轵��47k Ohmʱ����������û��������ֽ����轵��22k Ohm�����������ˣ����ڳɹ��ˡ�����22k Ohm��������Ҫ�ҵ��Ǹ�����ֵ��
��ʮ������װ3D��ӡ��
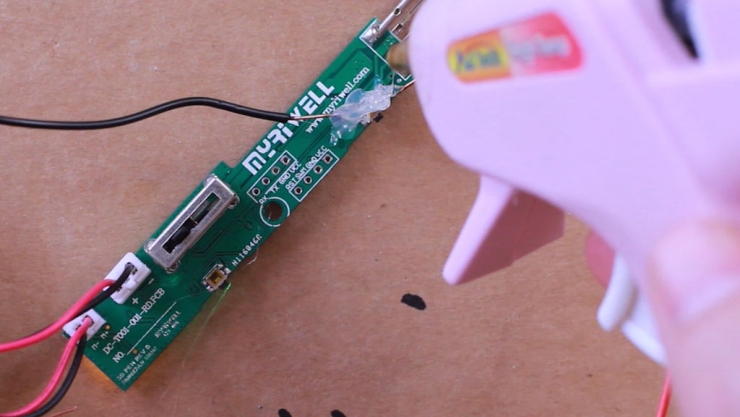
�����ÿ��ص�·�����ǾͿ��Խ�����װ�ˡ���ʱ����Ҫ��3D��ӡ��װ��Z���ϣ�Ϊ�˱��ִ�ӡ�ʵ��ȶ��������·��к����۽����������̶�ס��
��ʮһ�����������
���������ϵIJ��������Ӳ�����ֵ�������˳������ˣ�ʣ�µľ������������ˡ��������ǵ����ػ����ı��������ΪG-Code�����ᾫȷ�ļ����X,Y��Z����Ҫ�ƶ��ĽǶȺ;��롣��Ȼ����Arduino�����G-Code������ܻ���Щ�������������ǻ�Ҫ��װһ����ΪGRBL�Ľ���������������Arduino�ϰ�װ�ó������ϸ���裺
-
����Arduinoר�õ�GRBL Hex�ĵ������õ���0.8c�棬�ҵ�Arduino Uno�ͺ�ΪAtmega328����
-
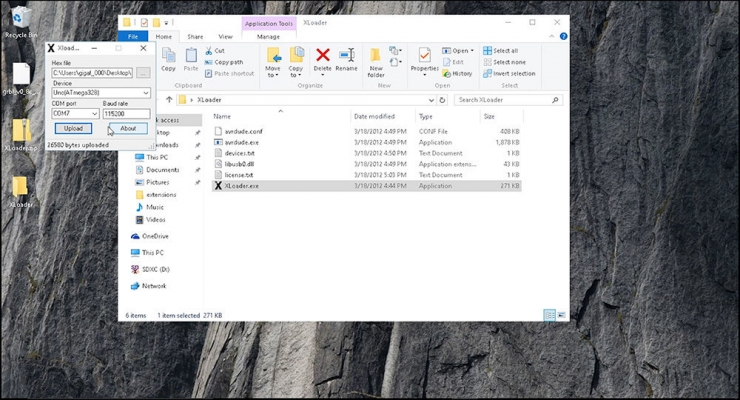
����XLoader������
-
��Arduino�������PC��
-
��Xloader������ѡ��GRBL Hex�ĵ���������ʽ�˵���ѡ��Arduino�����ѡ������Arduino�Ĵ���ͨѶ�˿ڡ�
-
������ϴ�����GRBL�����ϴ���Arduino��
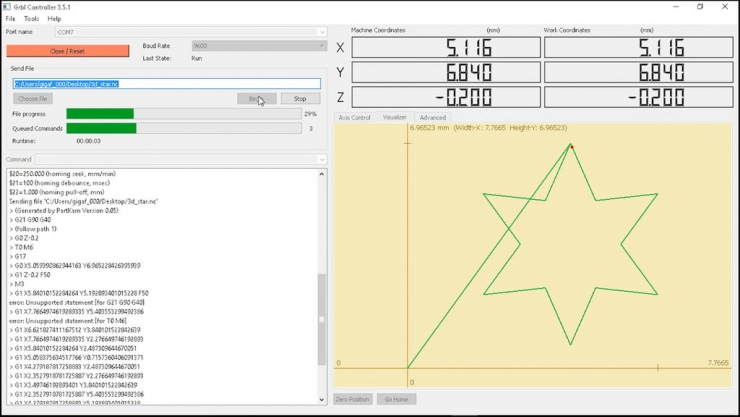
װ���˸���������Arduino��һ���������ˣ��������ǻ��ø�������һЩ�����Ա�������ػ����Ķ�������������Ҫʹ�õ�������ΪGRBL�����������ذ�װ����������ѡ�����Arduino�ӿڲ�������������ӡ�
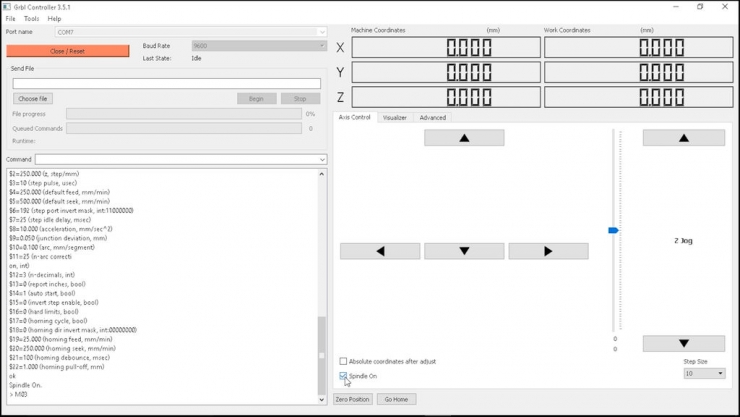
ȷ�����3D��ӡ�ʺ͵�Դ������������������Arduino���ϵ��ԡ������Ϳ�������Ļ���½ǵļ�ͷ�����Ƶ���ˡ�ע�⣬���½ǵ����������趨Ϊ1��������Ĭ�ϵ�10�����ijһ�����ƽ̨�������г��������з����������෴��������빤��>ѡ���ԭ���趨�ߵ��������ڴ�ӡ�ʵĿ����ϣ�������Ҫ��ѡ���������ᡱ��ѡ���һ�����Կ��ƴ�ӡ�ʵĿ��ء����⣬������ߵĿ����������ͨ��һЩ���������п��Ʋ�������M3������������ӡ�ʣ���M5��������رմ�ӡ�ʡ���Щ����һ��Ҫ�������
��ʮ��������ӡ����
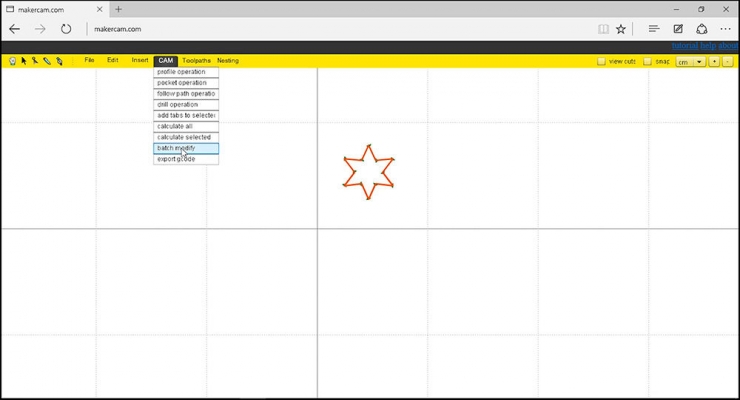
�㶨�����������Ǿ���ʤ���ֽ���һ���������������MakerCam.com��Ϊ��ӡ����������ͼ�ˡ���Ҳ����ʹ������Slic3r��3D��ӡ�����������������ǻ����ļ����Բ��ã�����ת�ƺͱ༭̫�Ѿ�������MakerCam�ϾͲ�������������⣬�����ͨ�����漸���������Լ��IJ���ͼ��
-
��������롱��ť��ѡ��һ��ͼ�ε�������ͼ��
-
ʹ�����Ͻǹ������еļ�ͷ������ѡ������ͼ��
-
�����ƶ������½ǵ������С�
-
�����ͨ���������е����ι��߶�ͼƬ������Ӧ�ģ�����ٽ����ϻ���Ļ���롣
-
ͨ��ҳ�����ϽǵĹ��ߣ���ɽ�ͼƬ�ߴ羫ȷ��������
-
���롰�༭>����ѡ����ɶ�����б����ģ�����������ǵĴ�ӡ���
-
����롰���>����·������������ʹ��������ֵ���д�ӡ���ԣ�
-
��Ŀ����ȡ��������ӡ����ĸ߶ȣ��������ҵ���ֵΪ-1��
-
����ȫ�߶ȡ��͡���������������趨Ϊ0.
-
�����͡��������ӡ����ÿ��ĸ߶ȡ����ڳ�ѧ����˵�����Ƽ�����ֵ�趨Ϊ0.2��������������ӡ�ı�һ�㣬���Խ�����һ��ֵ��
-
���������ʡ�������˴�ӡ���ٶȡ��ҽ����趨Ϊ50����ʱ��ӡ�ʵļ�ѹ�ٶ���͡�
-
���µ����ʡ�����������������ƶ����ٶȡ������ʵ����ô��Ҫ�������һ��ǰ����趨Ϊ50��
-
�����롰��>����ѡ��������·����
-
����롰��>���Gcode��������������ͼ���G-Code��
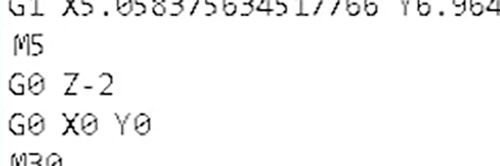
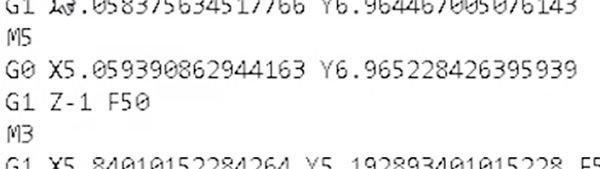
��ͨ��GRBL��������Gcode����ת��֮ǰ�����ǻ���Ҫ��Щ���ã��Ա����ܼ������ǵ�3D��ӡ�������ڣ��������ı��༭������Notepad�ȣ��д�֮ǰ��makercam.com�ϱ�����ĵ�����ʱ��ῴ��һ�ѡ����顱�������G-Code���룬��Щ�������ᷢ�͵�Arduino��Ϊһ����ָ�������Ҫ����M3���͡�M5�� ָ�����ӽ�ȥ���Ա���õĿ���3D��ӡ�ʵĴ�ӡ����������������ָ�����ϸ���裺
-
��G17��֮���ǵ�һ����M3��ָ�������ʱ��ʼ��ӡ�е����ˣ����Ի��ǽ���M3��ָ��д�ڡ�F50��ָ���ɡ�
-
������Ĵ����У�ÿ�ο�����F50������������һ���м��롰M3��ָ�
-
��һ������Ҫ���ľ���Ѱ�ҡ�Z0��ָ����Ὣ�����趨Ϊ0���ף�����һ�������ֱ�Ӻʹ�ӡ���������ˡ�����ÿ�μ�����Z0��ָ���ֱ�ӽ���ɾ��������á�M5��ָ���������
-
�����ġ�M5��ָ�������Ӧ����Z��ص���ʼλ�á���Ϊ֮ǰ�ҽ���ӡ�߶���Ϊ-1�����������Z��߶�Ӧ��Ϊ-2.
-
���趨��Z��߶Ⱥ�������Ҫ��X���Y��Ҳ�ڴ�ӡ������ص����ǵij�ʼλ�á�����Z��Ĵ��������롰G0 X0 Y0�� �������һָ�
-
��������Ϳ��Կ�ʼ��ӡ�ˡ�
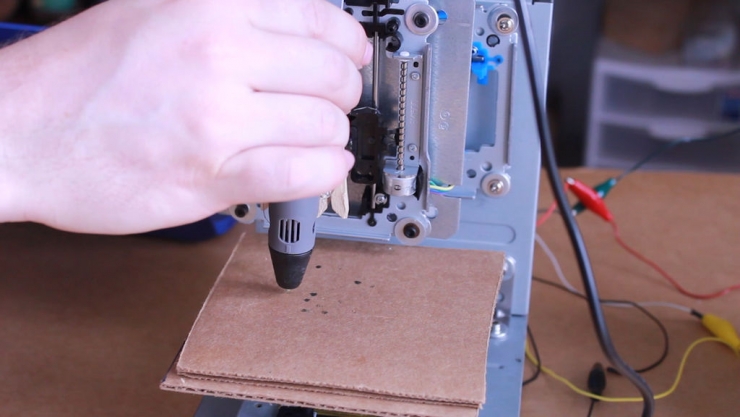
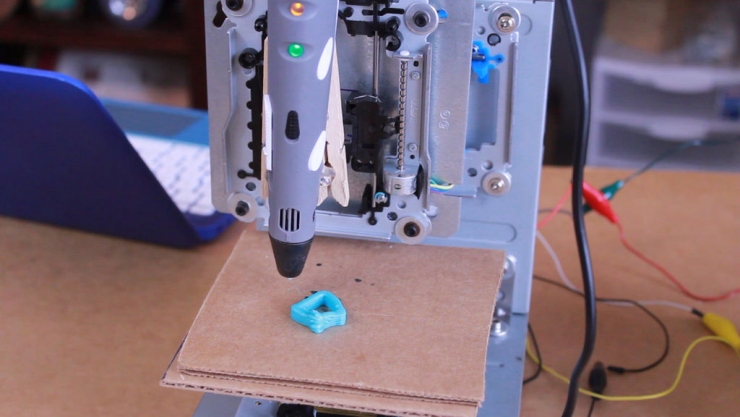
��ʮ��������ʼ����3D��ӡ
���һ���൱��ֻҪ��Z���ϵ�3D��ӡ���ƶ���Y��ƽ̨�Ͼ��У��м�Ҫ���п�϶����������´�ӡǰ������飬ȷ����Դ������Arduino���ϵ��ԣ���ӡ�ʿ�ʼ���ȡ����Ŵ�GRBL���������������Ͽ����塣����Ļ�ϵ����ѡ���ļ�����ť�����Ϳ���ѡ������Ҫ��ӡ���ļ��ˡ���������ʼ����ť��Ȼ��Ϳ����ڴ����Լ���3D��ӡ�����ˡ�
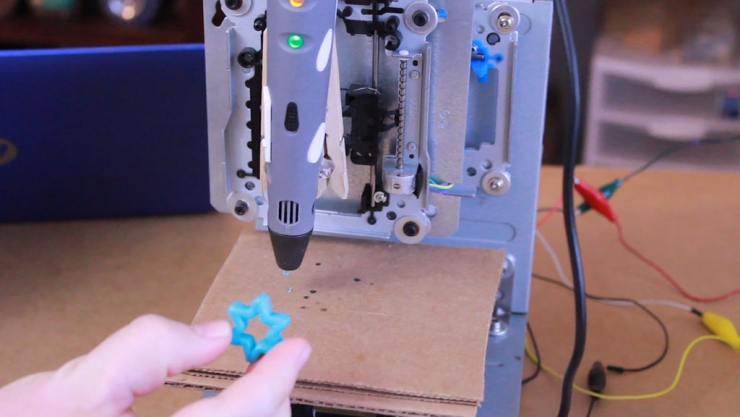
�Ͻ�ȥ���ɣ�
(���α༭��admin)

 һ���˽�3D��ӡˮ����
һ���˽�3D��ӡˮ���� �鱦���3D��ӡ���ռ�ָ��
�鱦���3D��ӡ���ռ�ָ�� ���������3D��ӡ���ռ�ָ
���������3D��ӡ���ռ�ָ ���������ˮ3D��ӡ����
���������ˮ3D��ӡ���� �ؿ���3D��ӡ֧�ŨC�ռ�ָ
�ؿ���3D��ӡ֧�ŨC�ռ�ָ 6�ִӴ���ȥ��3D��ӡ����
6�ִӴ���ȥ��3D��ӡ���� 2023��������3D
2023��������3D FDM�IJ�PLA��ABS
FDM�IJ�PLA��ABS ˭������õ�ģ��
˭������õ�ģ�� 10����õ�FDM
10����õ�FDM  ����˹�Ӻ����״�
����˹�Ӻ����״�

